🚀 Ctrl-Food
Fully autonomous fast-food production systems
Robotic cooking, assembly, and
cleaning - containerized, modular, ans staff-free
🎥 Demo Videos
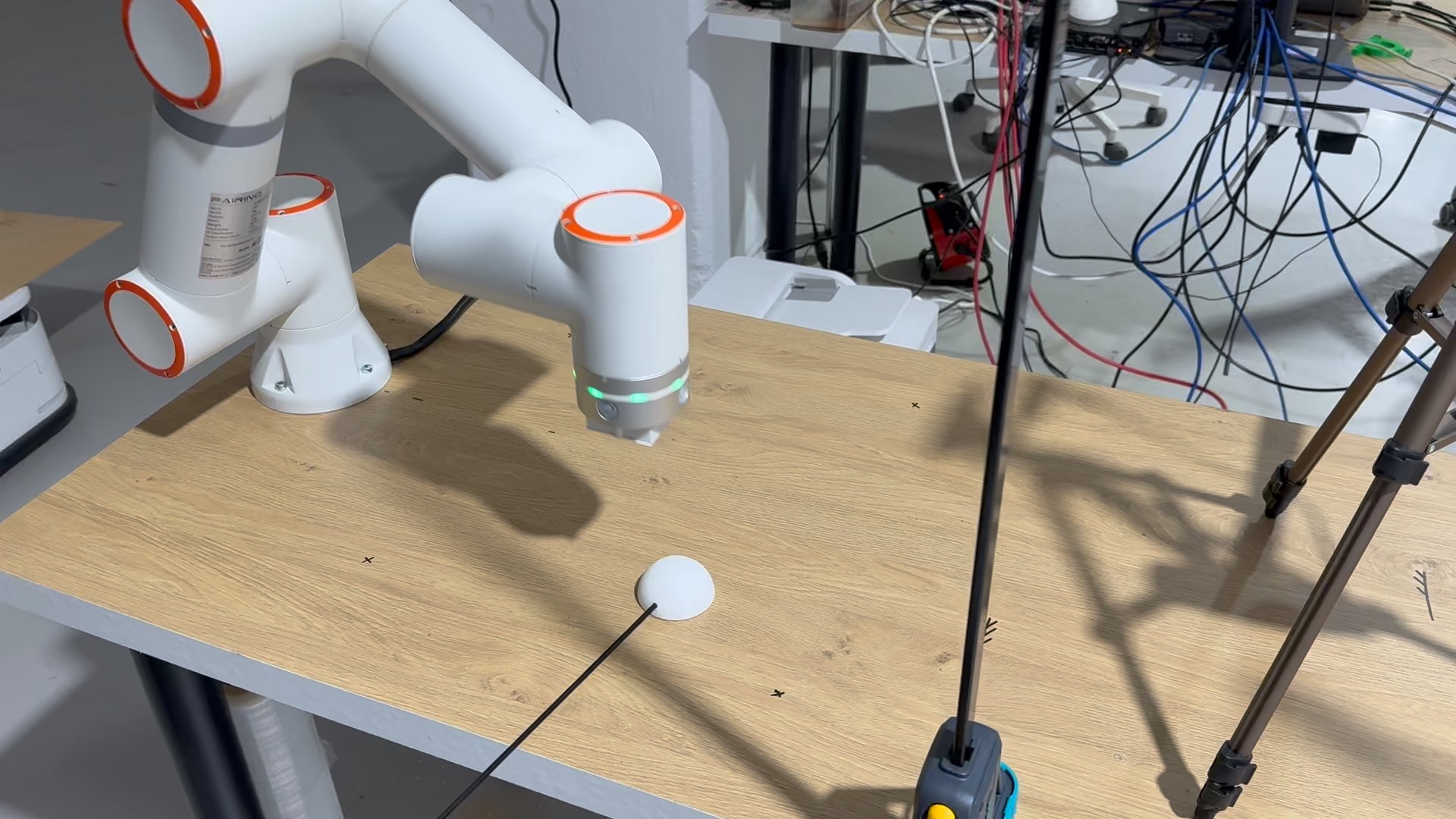
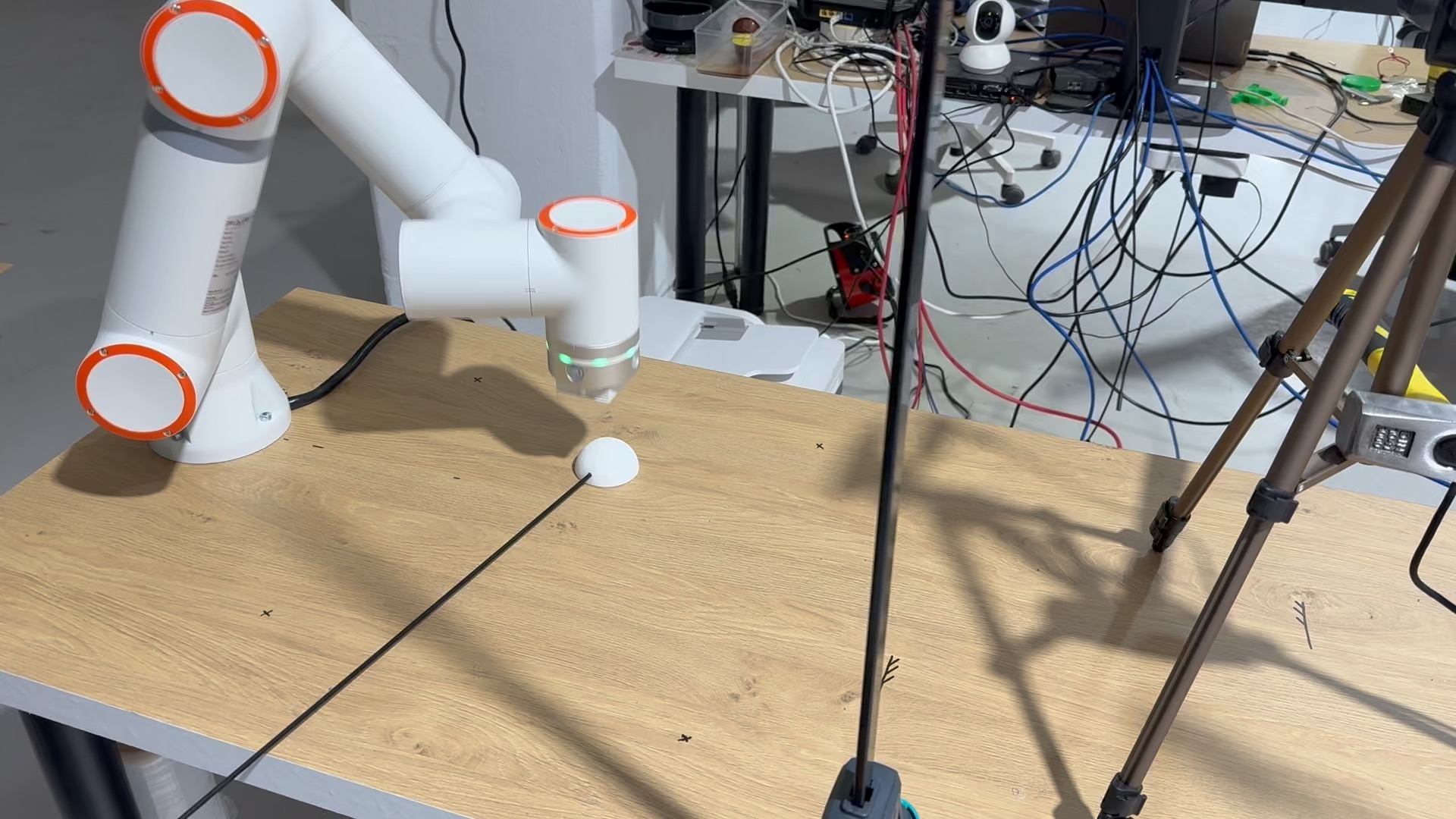
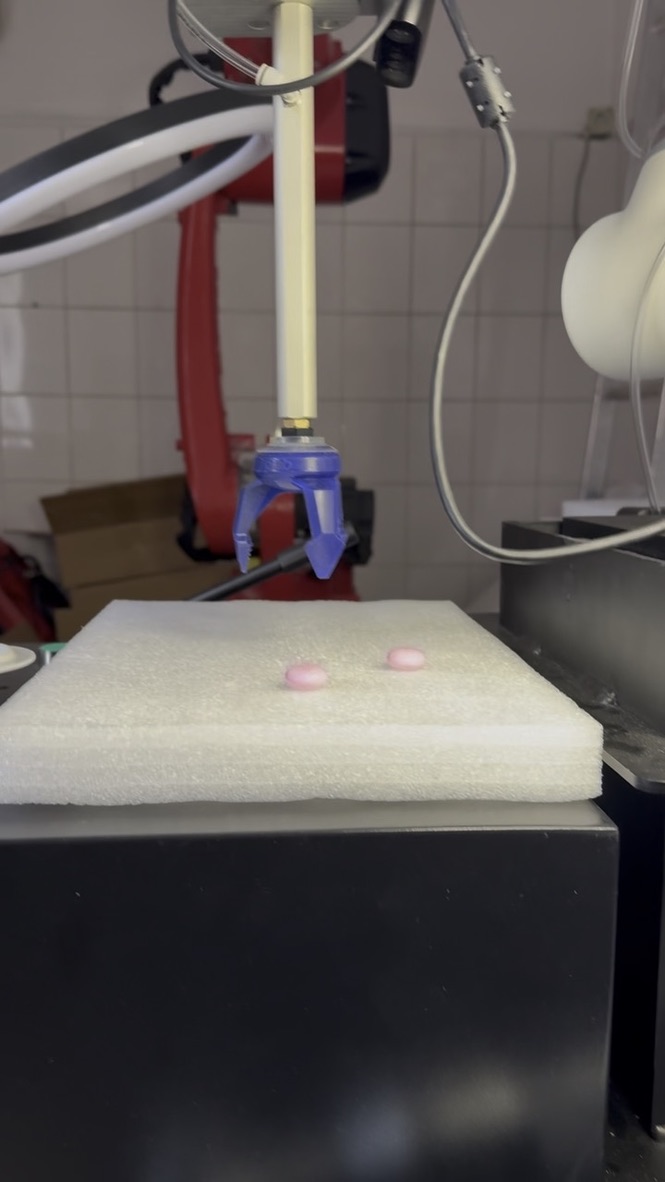
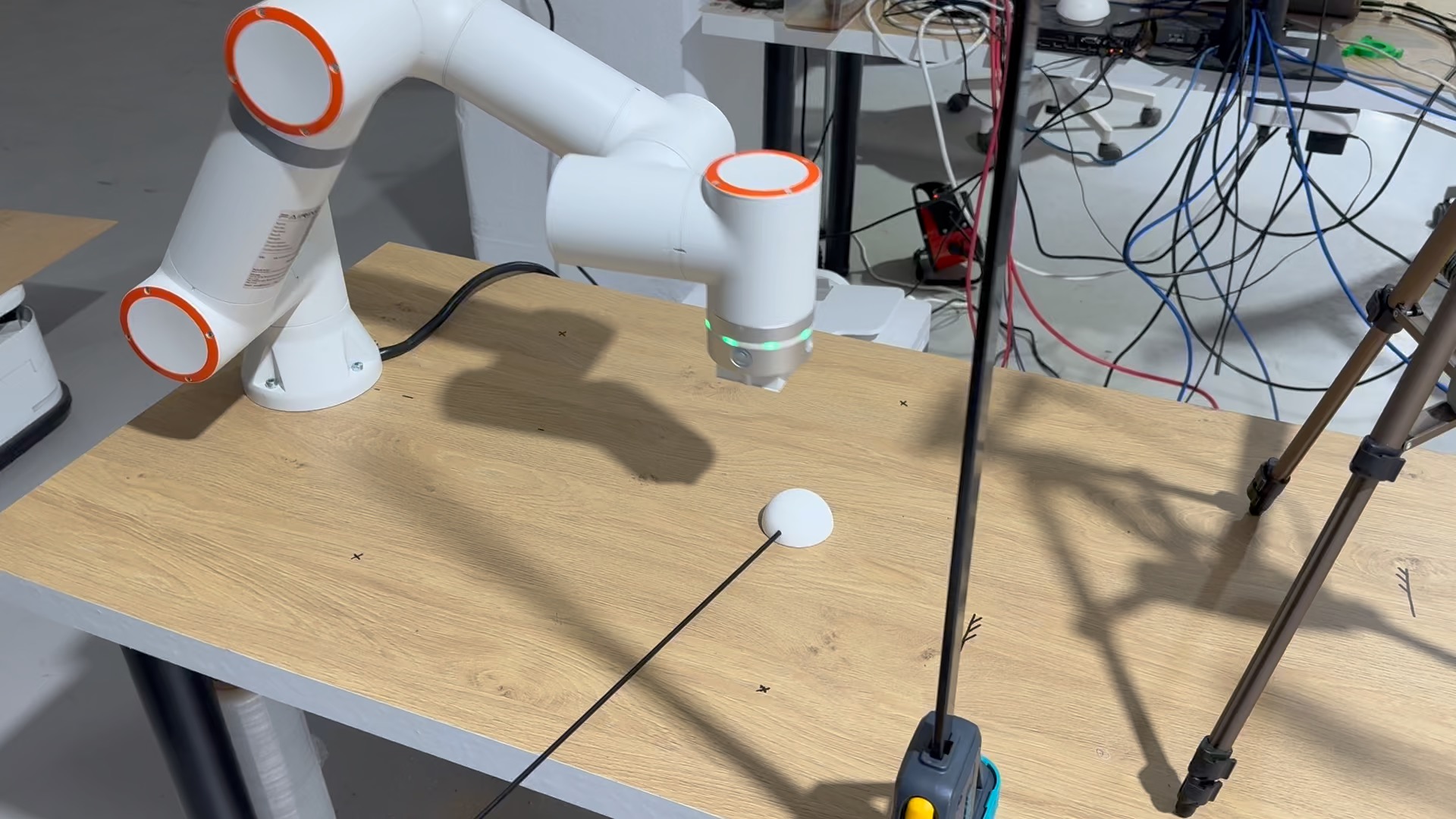
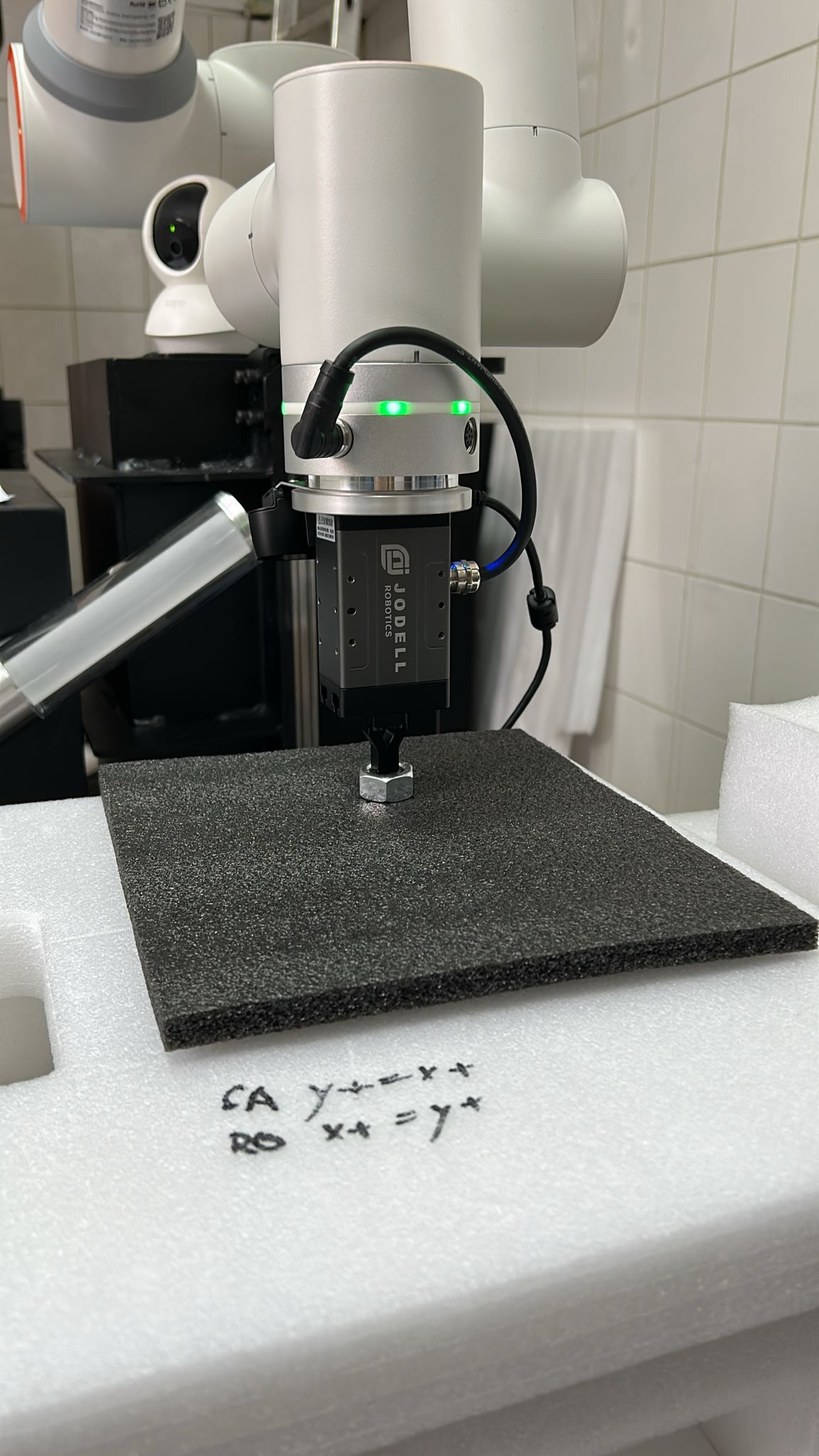
1. Picking
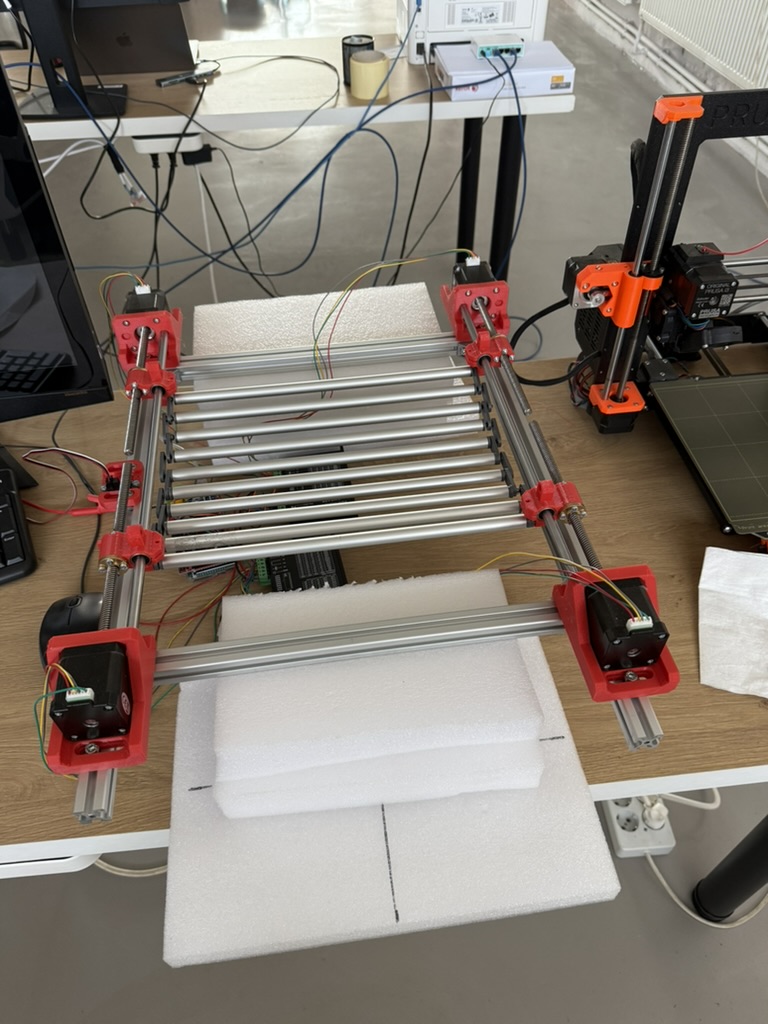
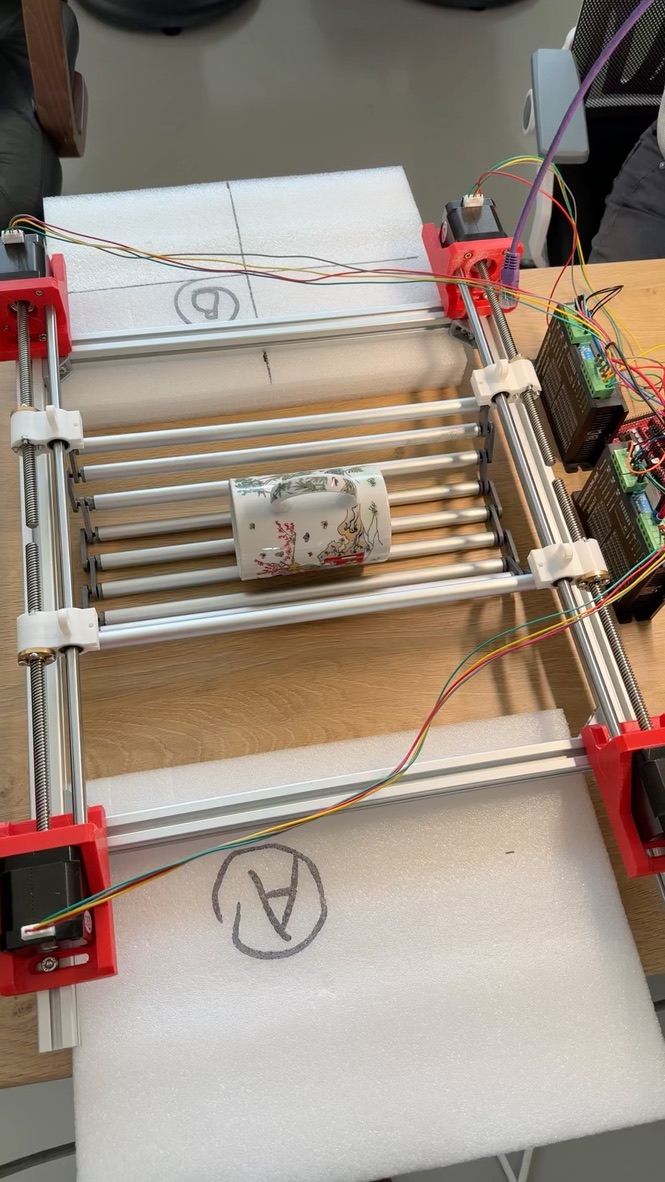
2. Wrapping
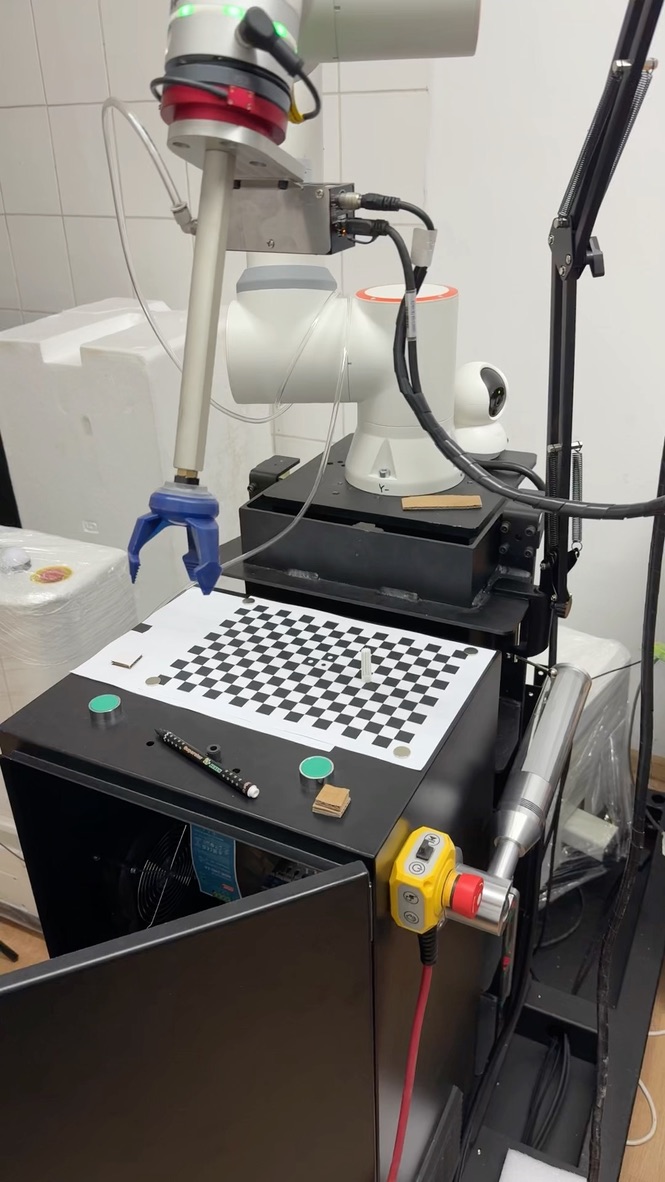
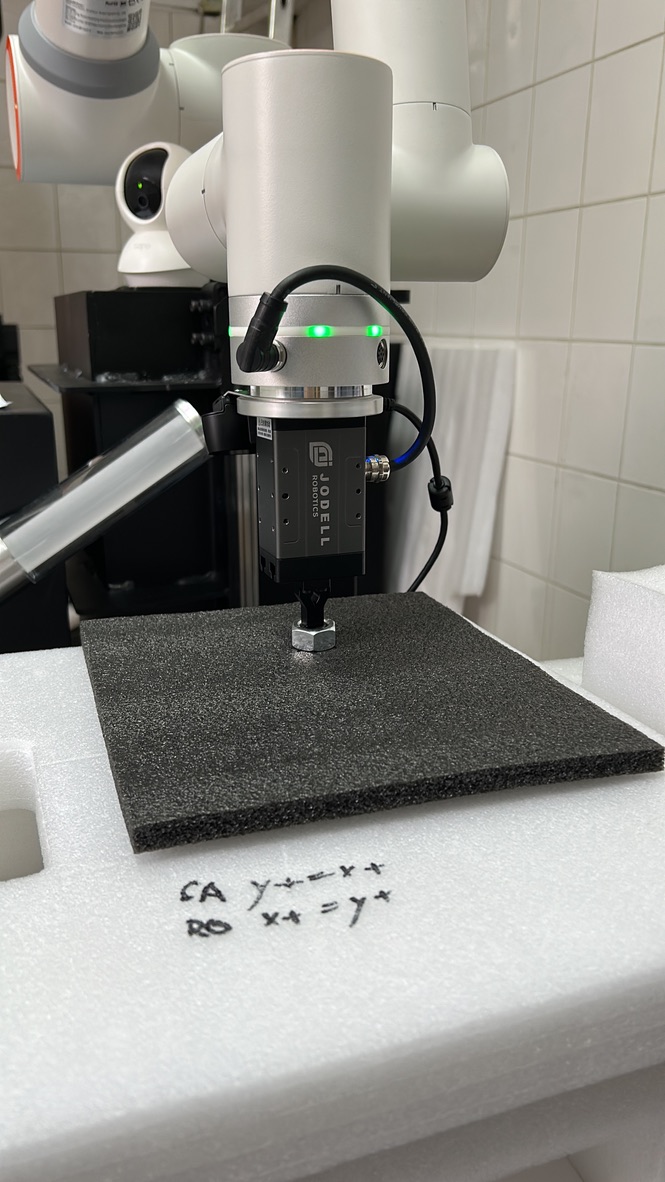
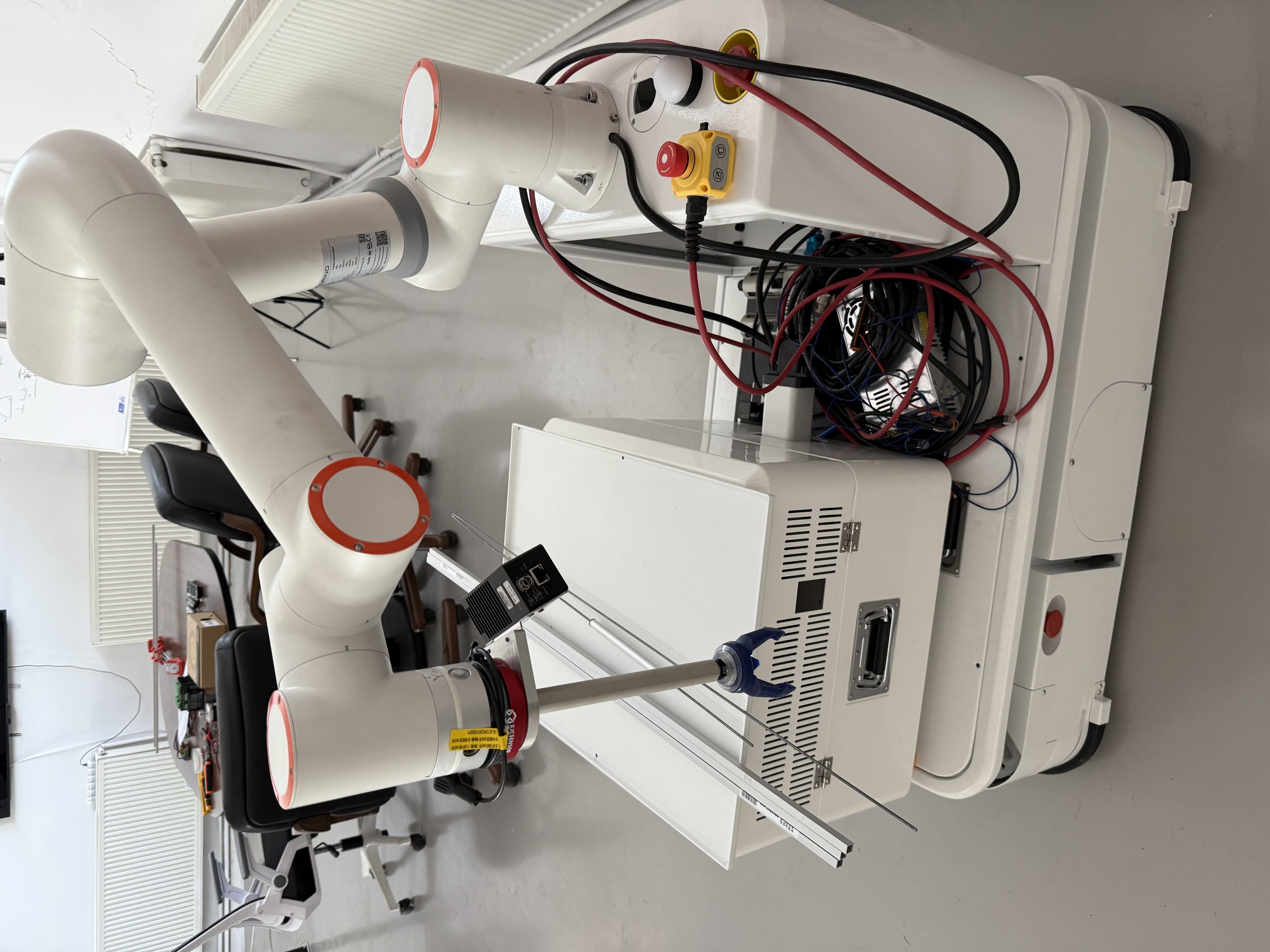
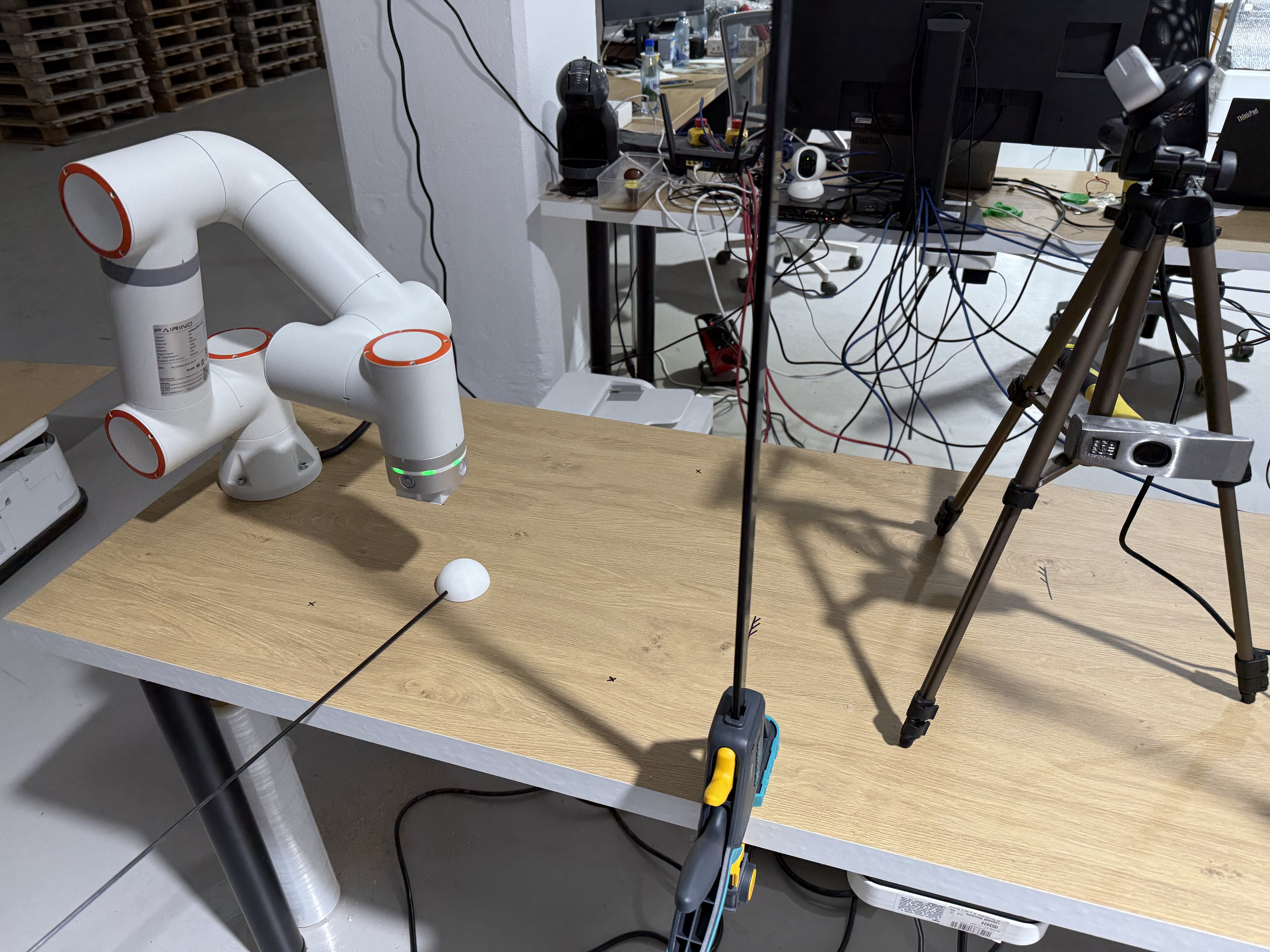
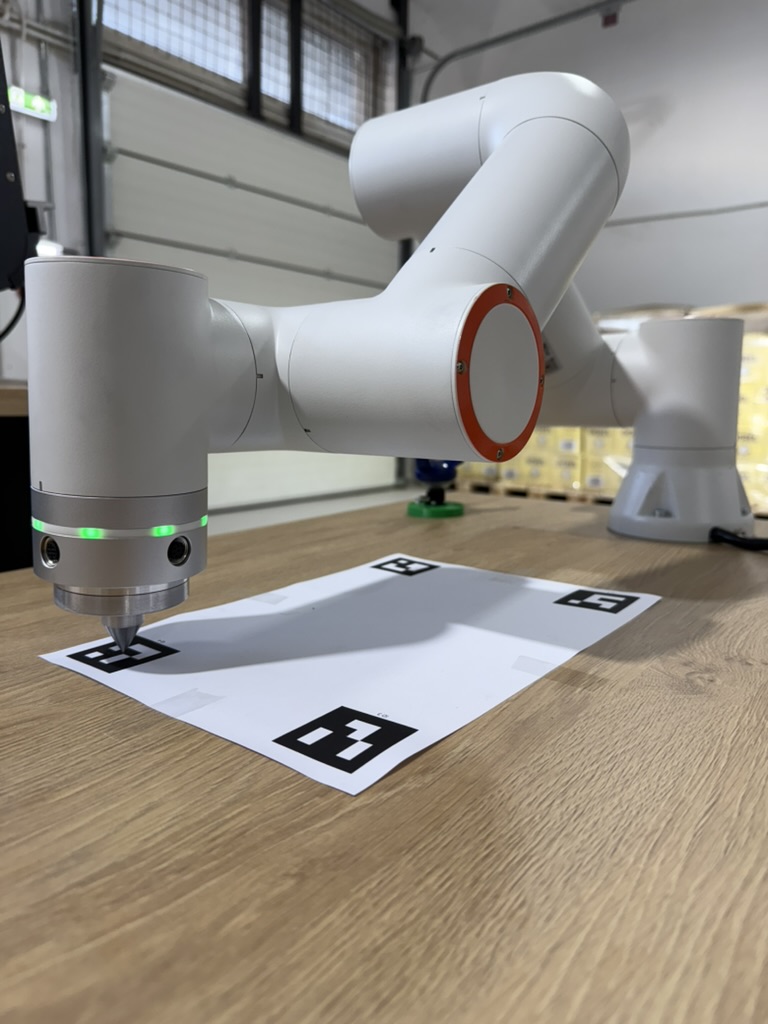
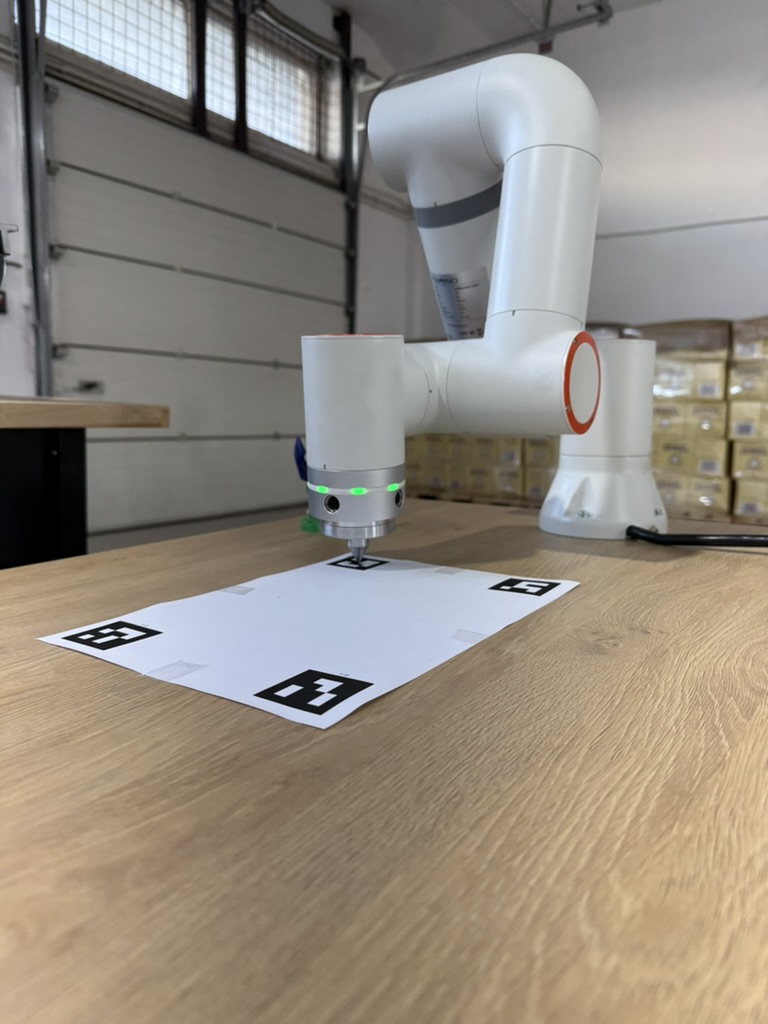
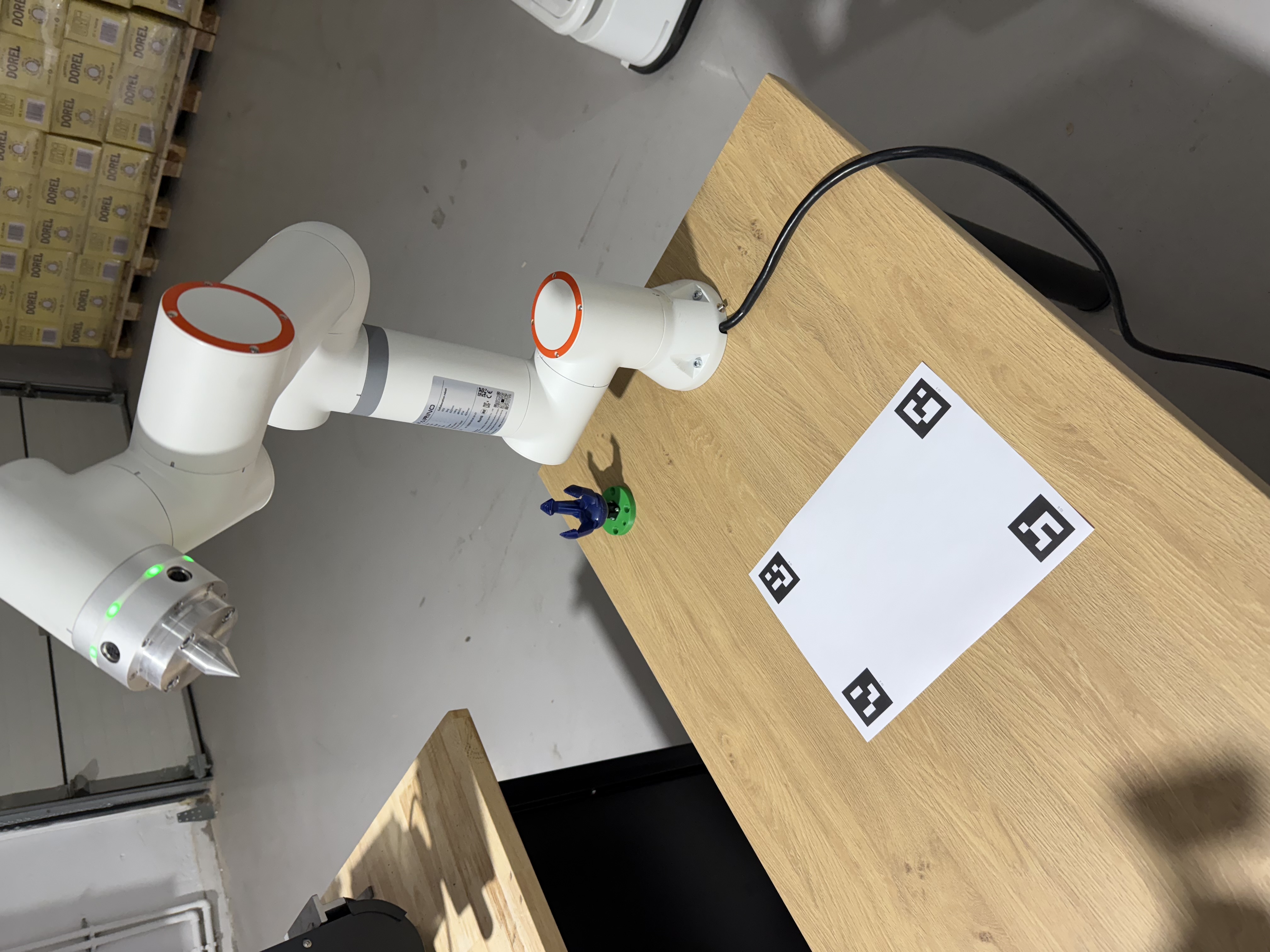
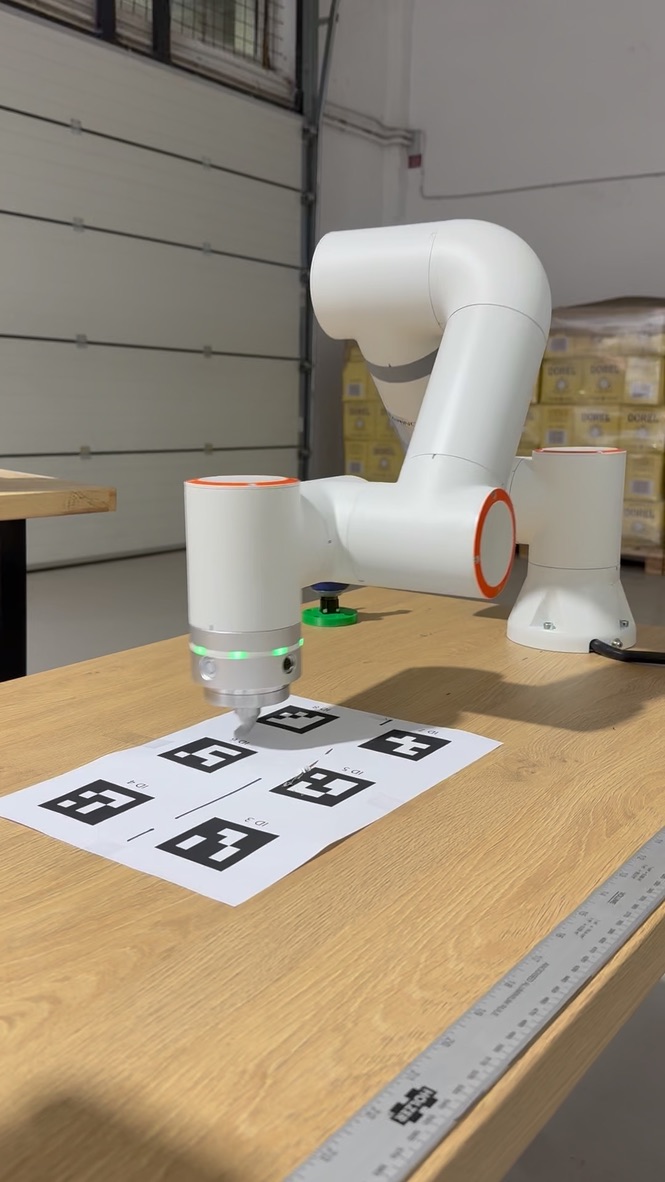
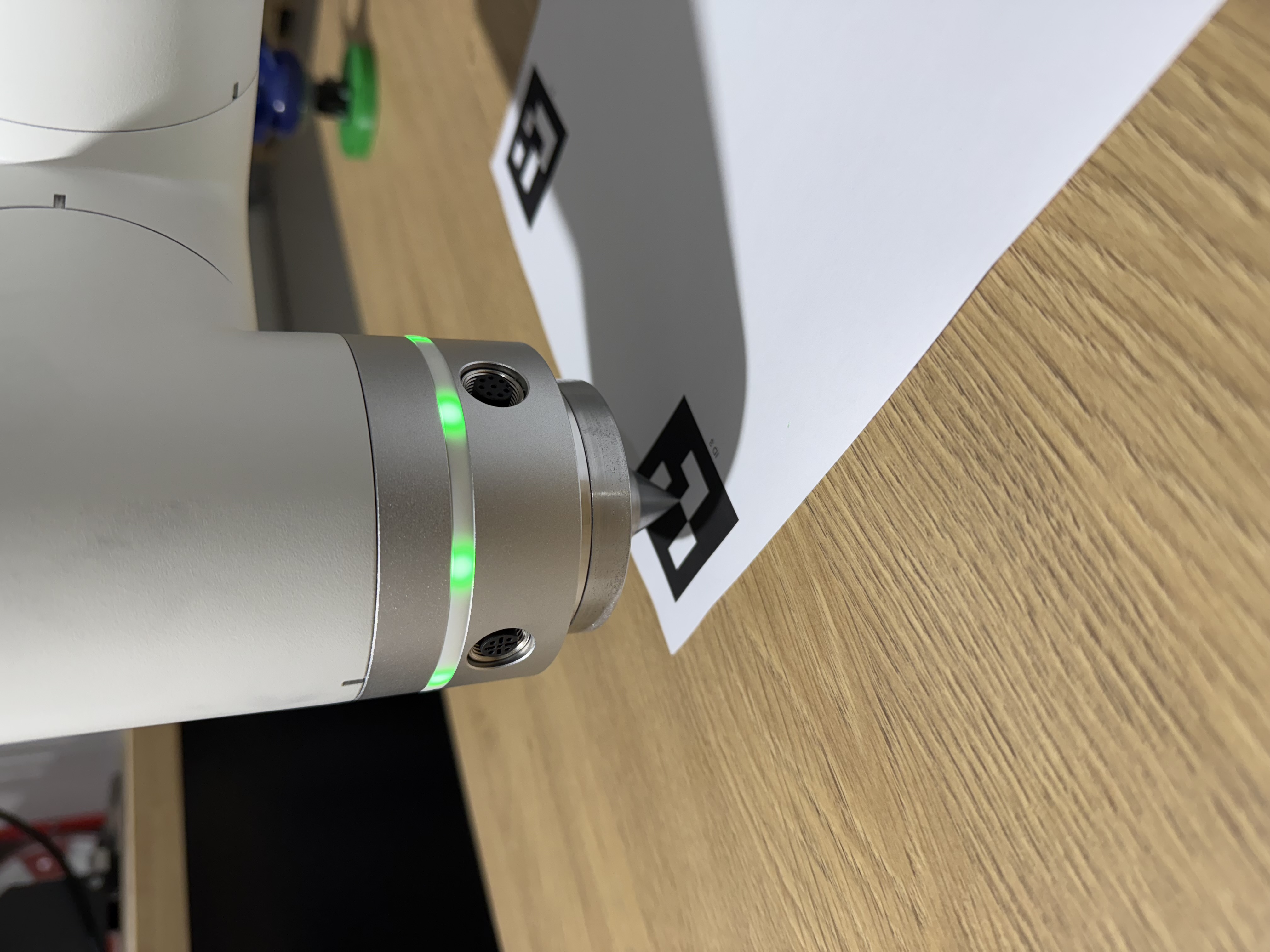
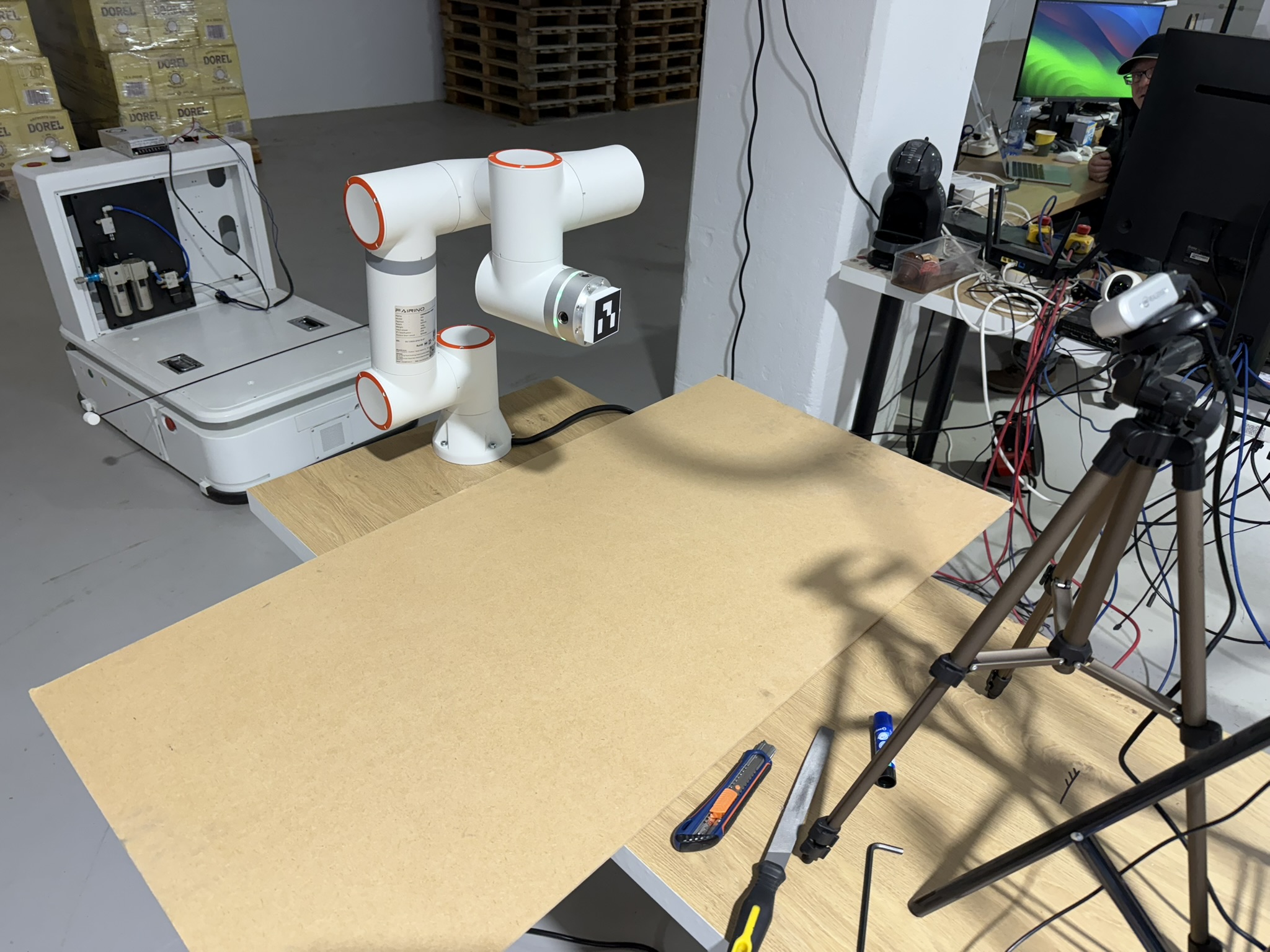
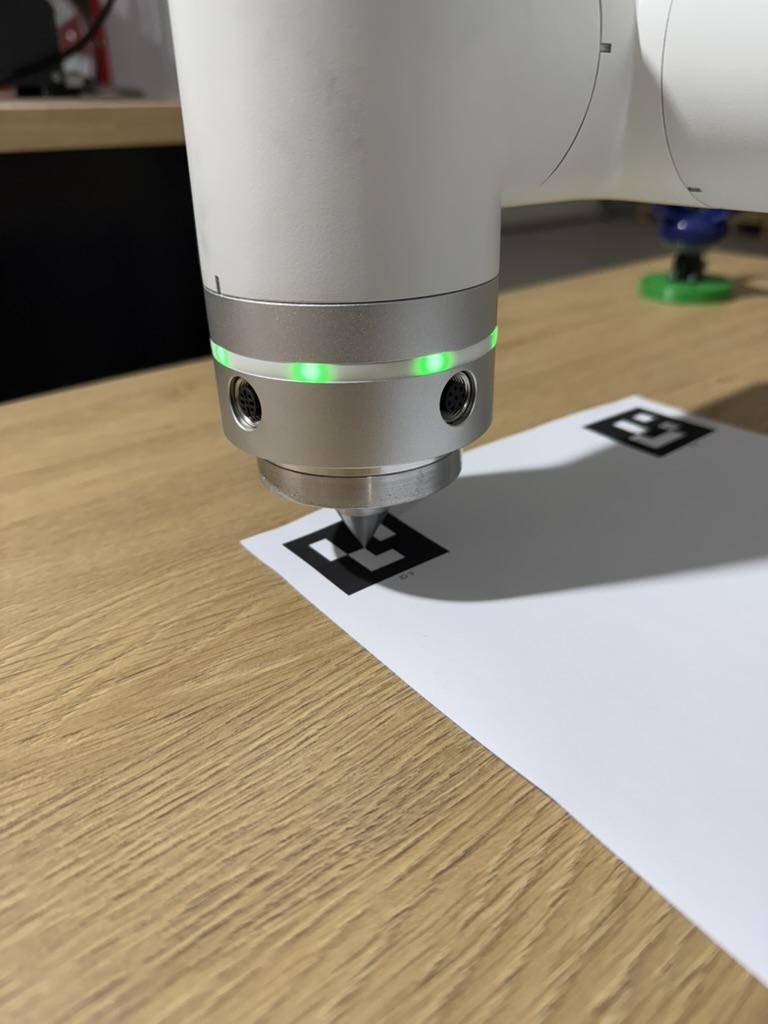
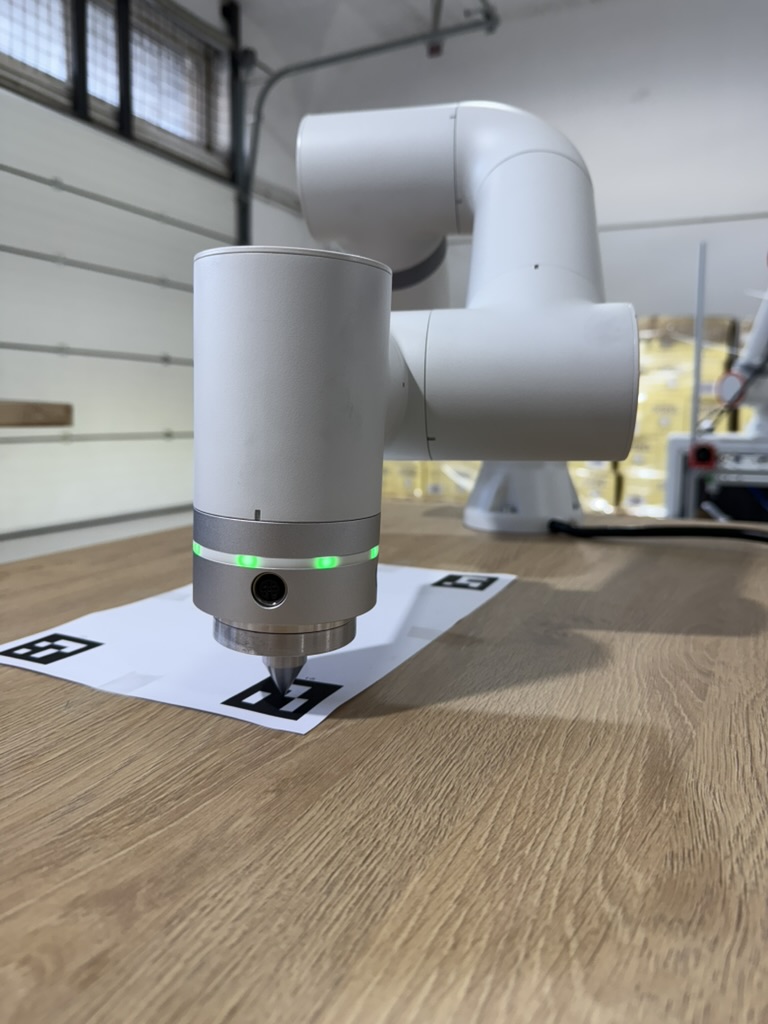
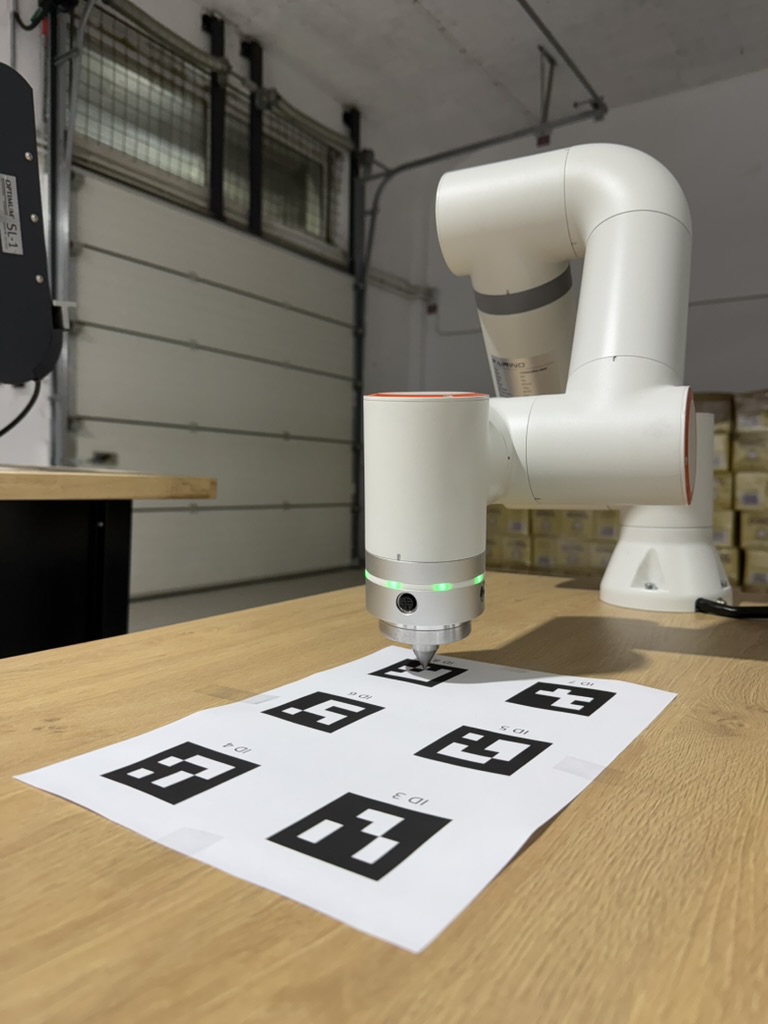
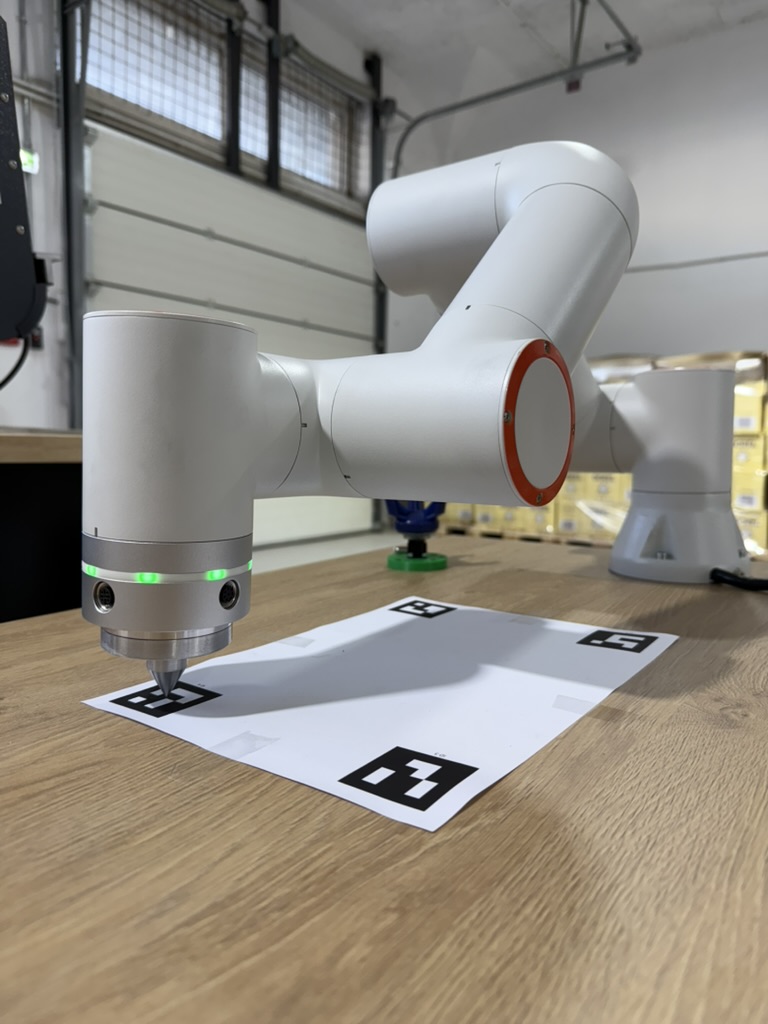
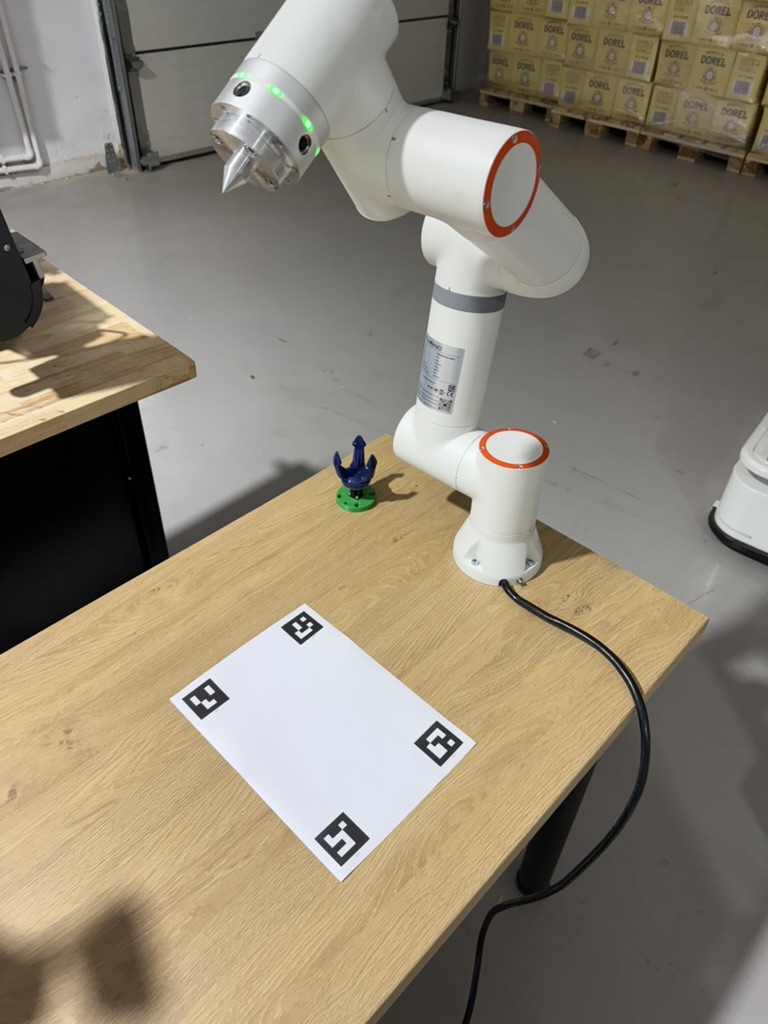
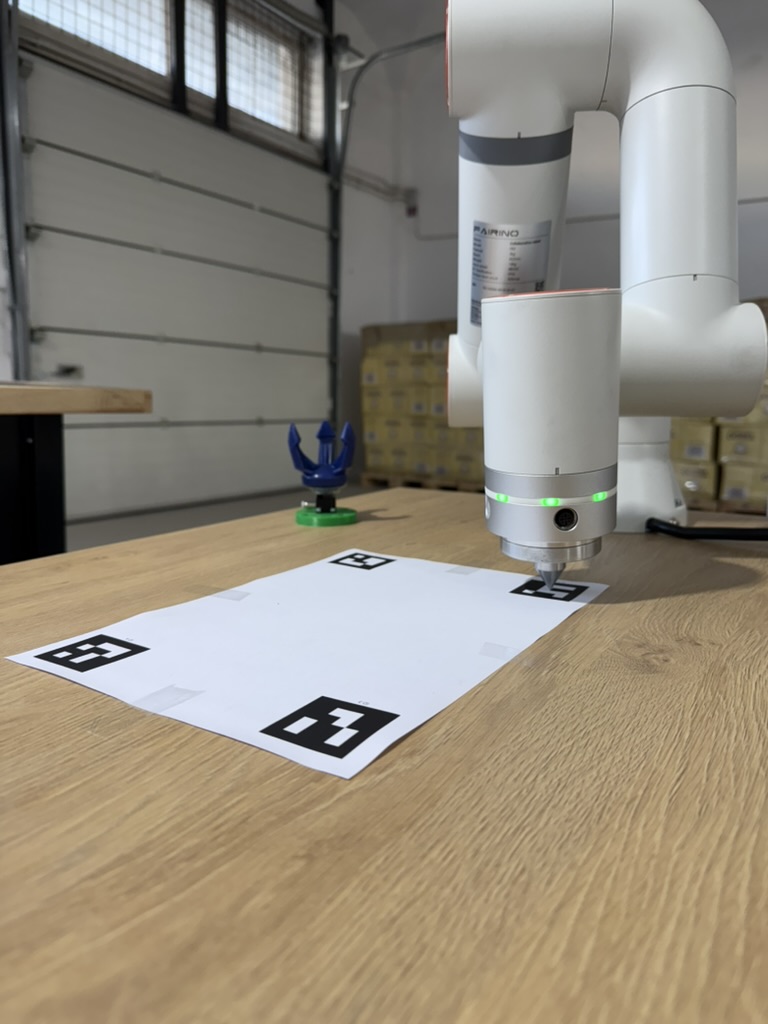
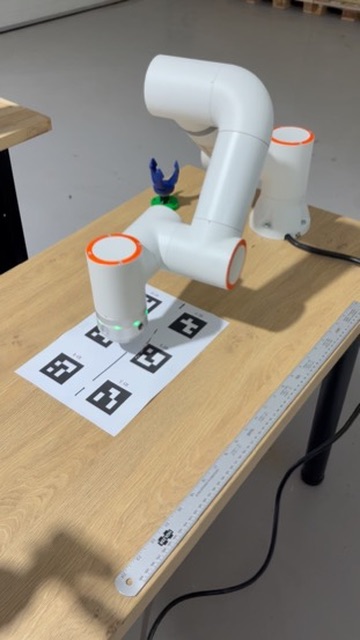
3. Calibration
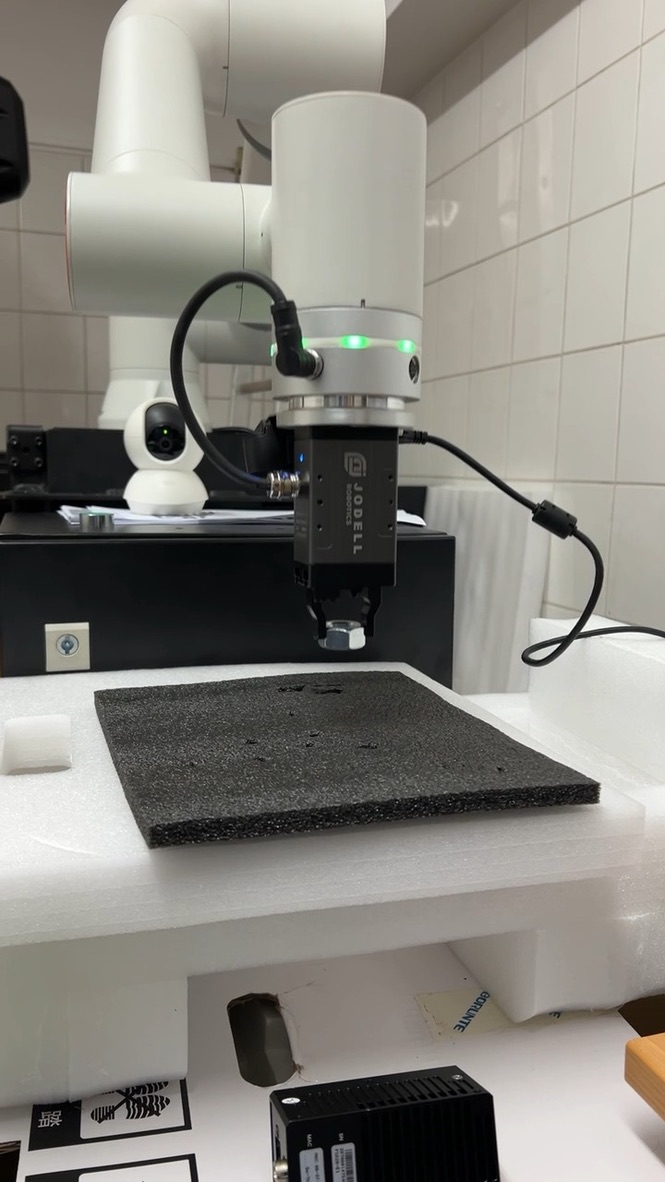
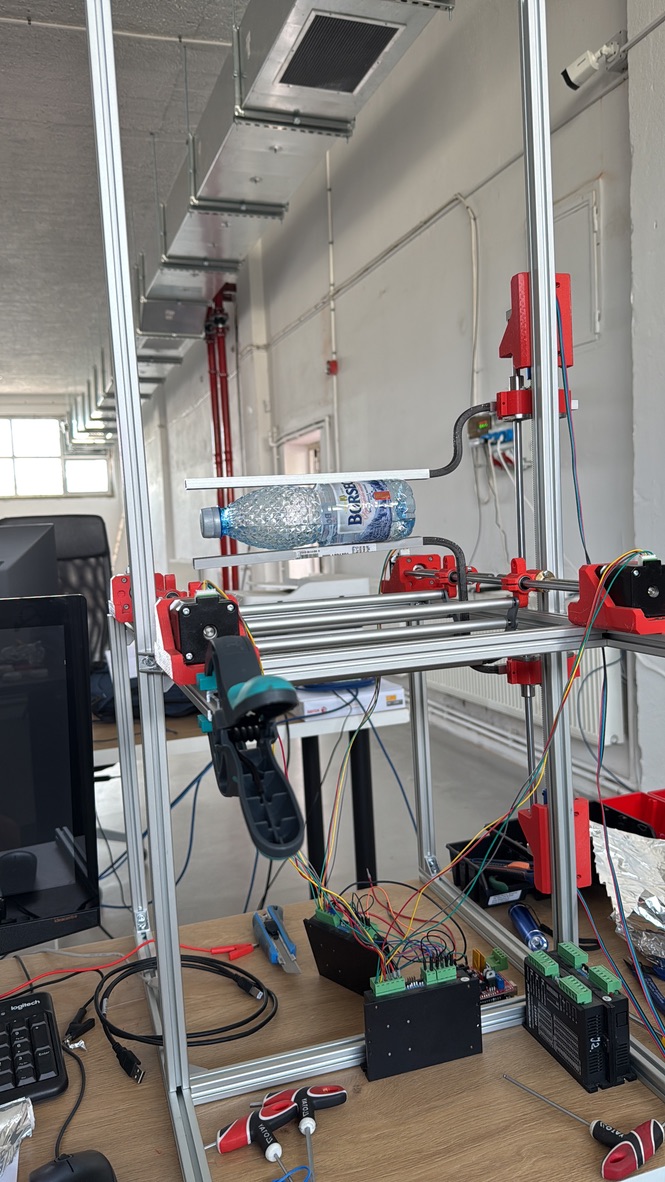
4. Thermal
📸 Demo Pictures
1. Picking






2. Wrapping




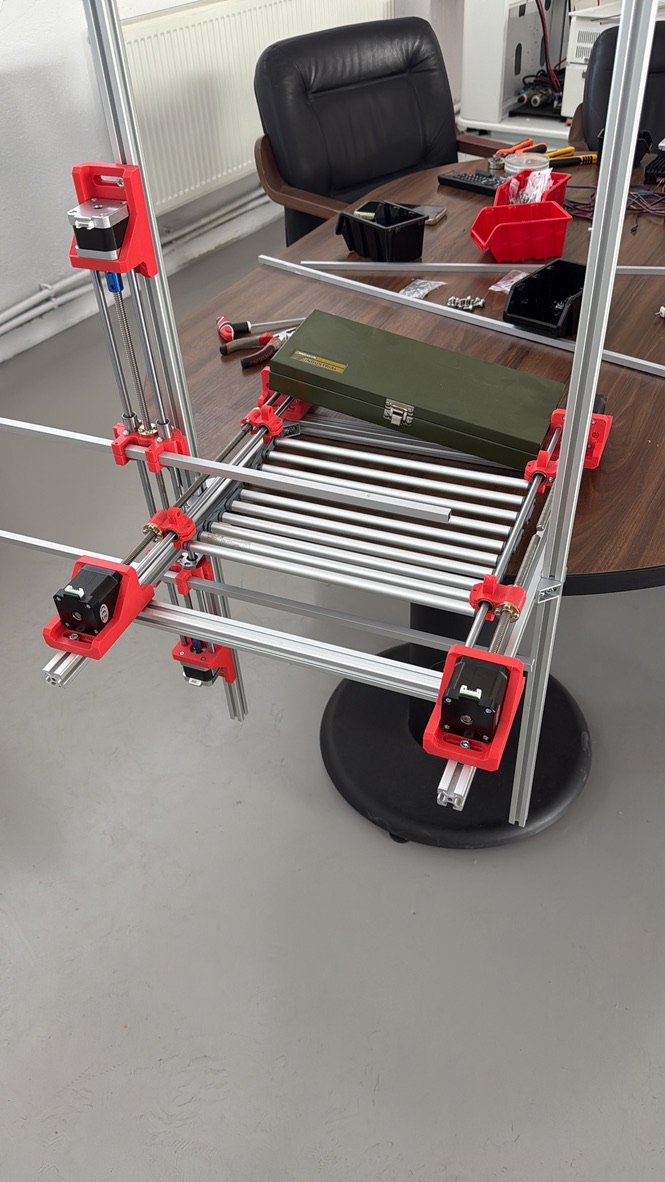







3. Calibration






4. Thermal
🔧 What We’re Building
Ctrl-Food is both hardware and software.
🦾 Hardware
- receives ingredients
- selects & mixes vegetables
- cooks chicken/meat
- dispenses sauces
- assembles & wraps the shawarma
- packages it
- cleans itself
All 24/7, no staff, consistent output, and highly scalable.
☁️ Software (ERP SaaS)
A full cloud platform that manages:
- Order entry
- Production scheduling & execution
- Inventory & ingredient tracking
- Receiving goods and purchasing
- Shipping & delivery workflows
- Accounting integration
- Real-time analytics and chain-wide reporting
The robots are the execution layer.
The ERP is the brain.
Together they form the world’s first fully autonomous restaurant operating system.
🔥 Why This Matters
Fast-food is one of the most labor-intensive industries.
A typical shop spends $105k/year on staff.
We eliminate that entirely.
Our first partner — Shaormitza.ro (~$1M/month revenue) — is hosting pilot modules and committed to expanding to 40+ locations once validated.
This gives us:
- real production environments
- real data
- real revenue paths
- real scalability
🛠 Progress
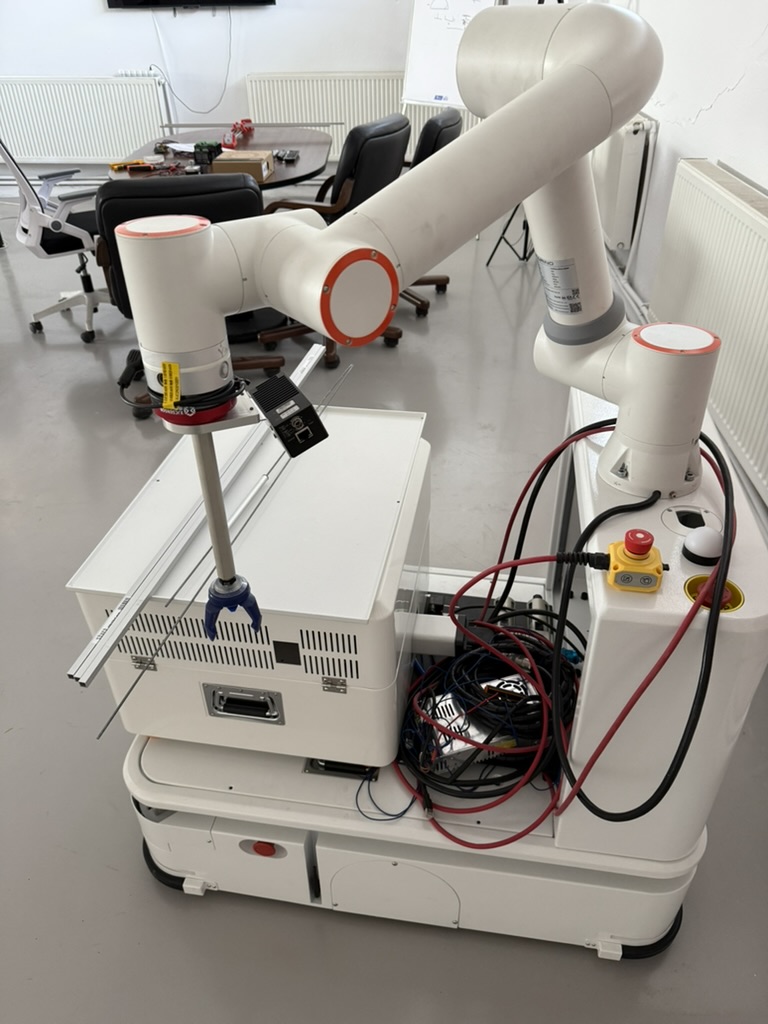
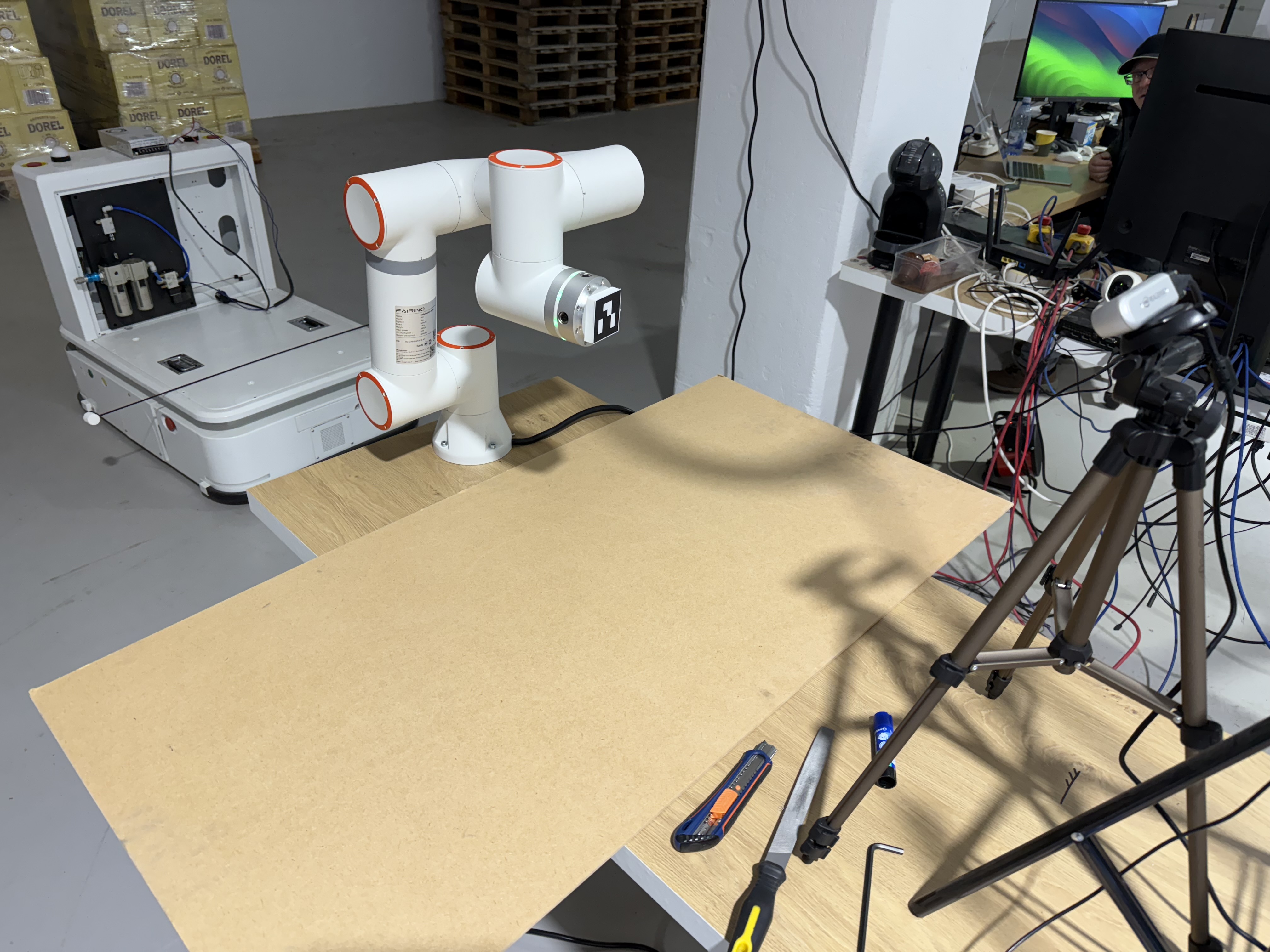
Robotics & Manipulation
- FR5 cobot performing stable pick-and-place on real vegetables
- Evaluated a Borunte 100 kg industrial robot for automated receiving, pallet movement, and heavy-load workflows
- Tested a Borunte SCARA robot for ultra-fast pick-and-place cycles and high-throughput ingredient handling
- Custom EOATs: pneumatic, electromechanical, and soft grippers with interchangeable fingers and force sensors
- Designed and fabricated custom fixtures: 3D-printed prototypes and steel/aluminum flanges manufactured in China
- Depth-sensing evaluation: tested Orbbec, Percipio, and Intel RealSense; selected Intel RealSense D421f for precision and reliability
- Built a depth-based vegetable-handling pipeline with consistent grasp accuracy
- Optimized the geometry and arrangement of vegetable pots for fastest robotic access and high throughput
🤖 Vision & AI
- YOLO (v8, v12) for object detection
- Depth-based picking using Orbbec, Percipio, Intel RealSense
- Calibrated multi-camera setup with ArUco & chessboard workflows
- Evaluated radiometric thermal sensing using the Leopard Lepton module (TELEDYNE FLIR Lepton® 3.5) for real-time surface temperature monitoring during cooking
- Developed an automatic camera-to-robot calibration routine: the robot moves an ArUco marker through ~100 known poses, logging robot and camera data to compute and validate the transformation matrix
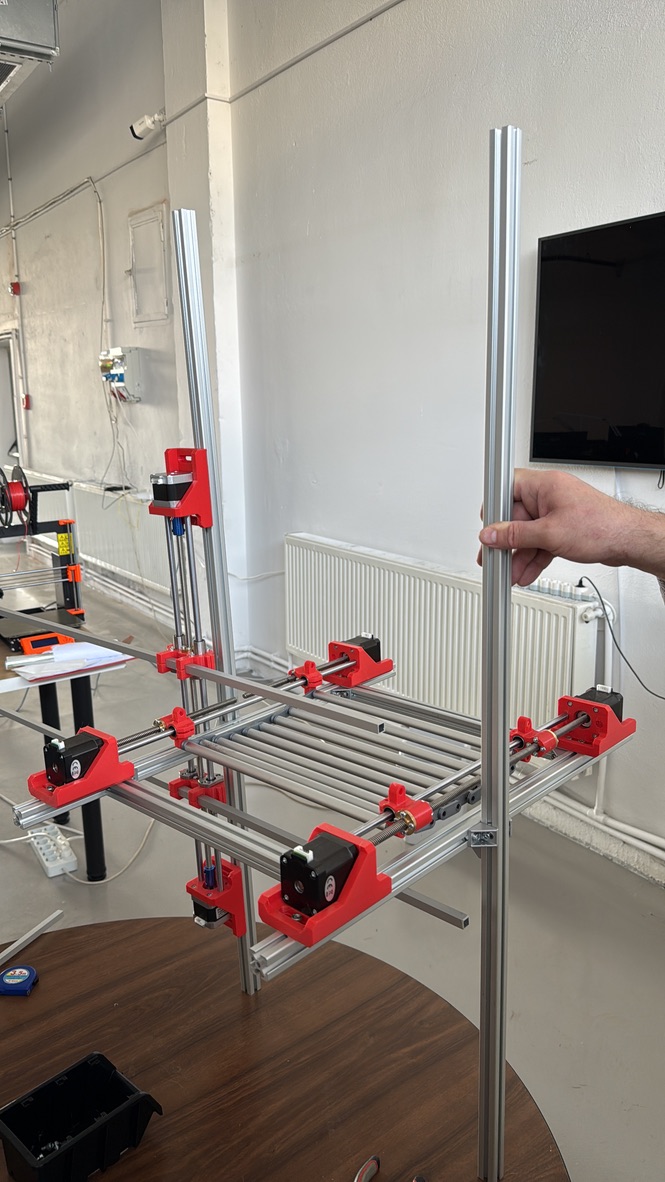
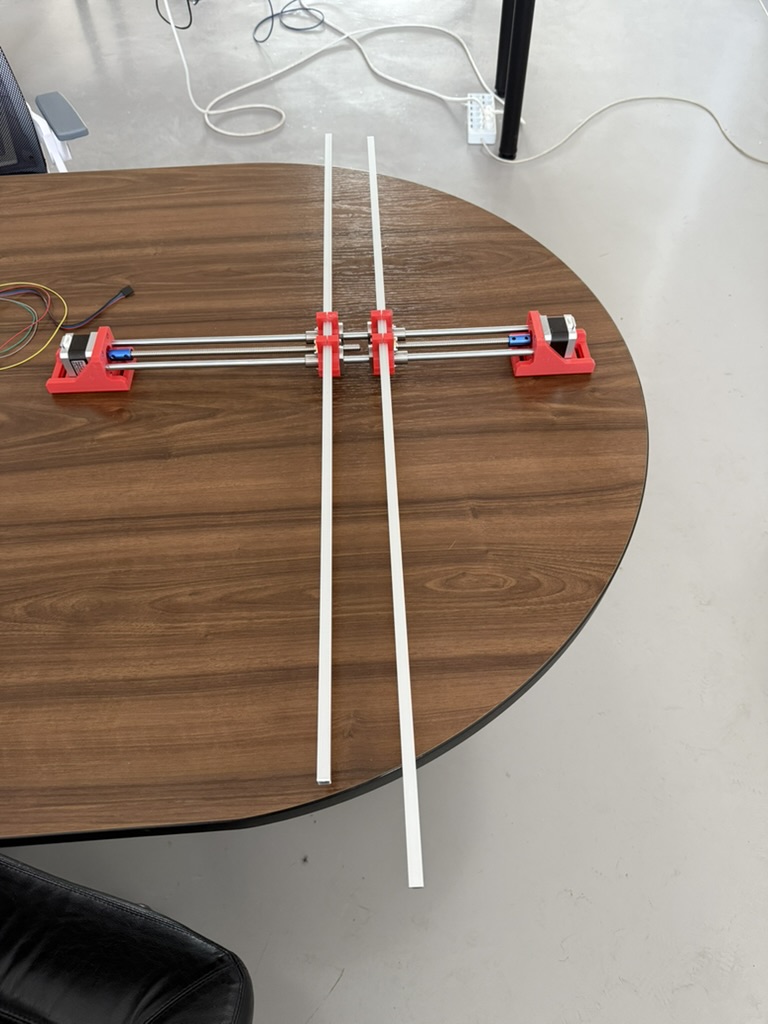
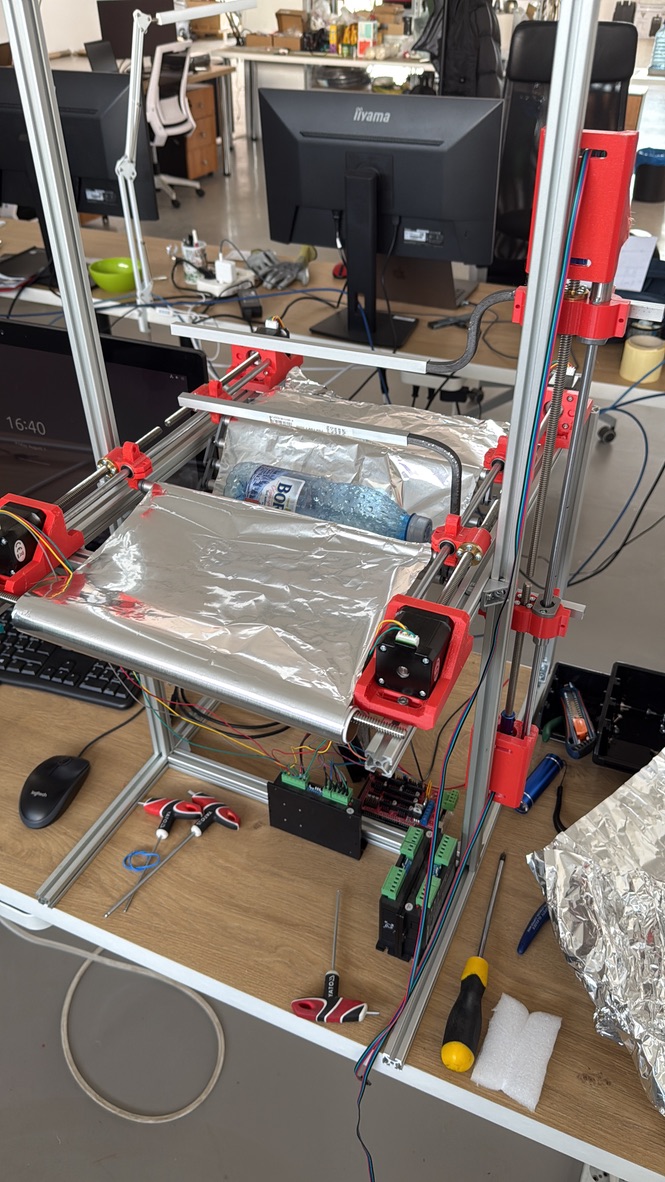
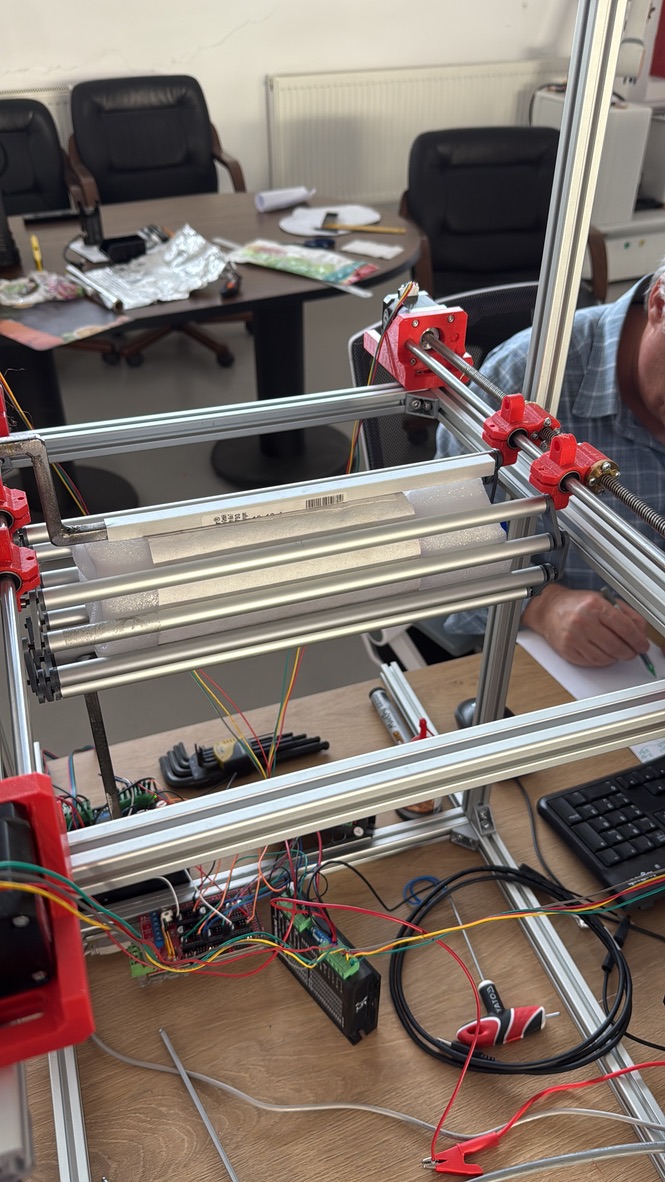
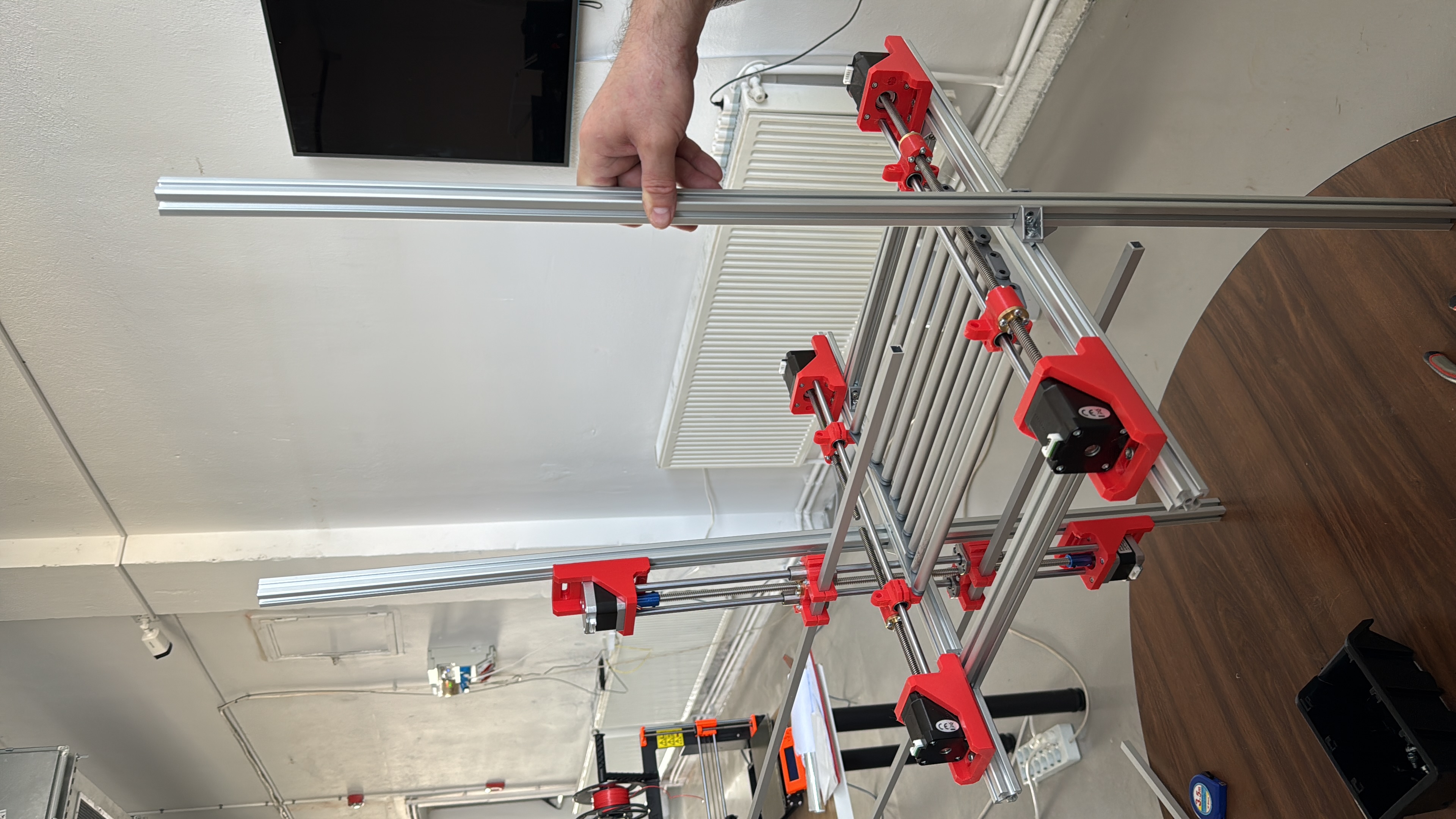
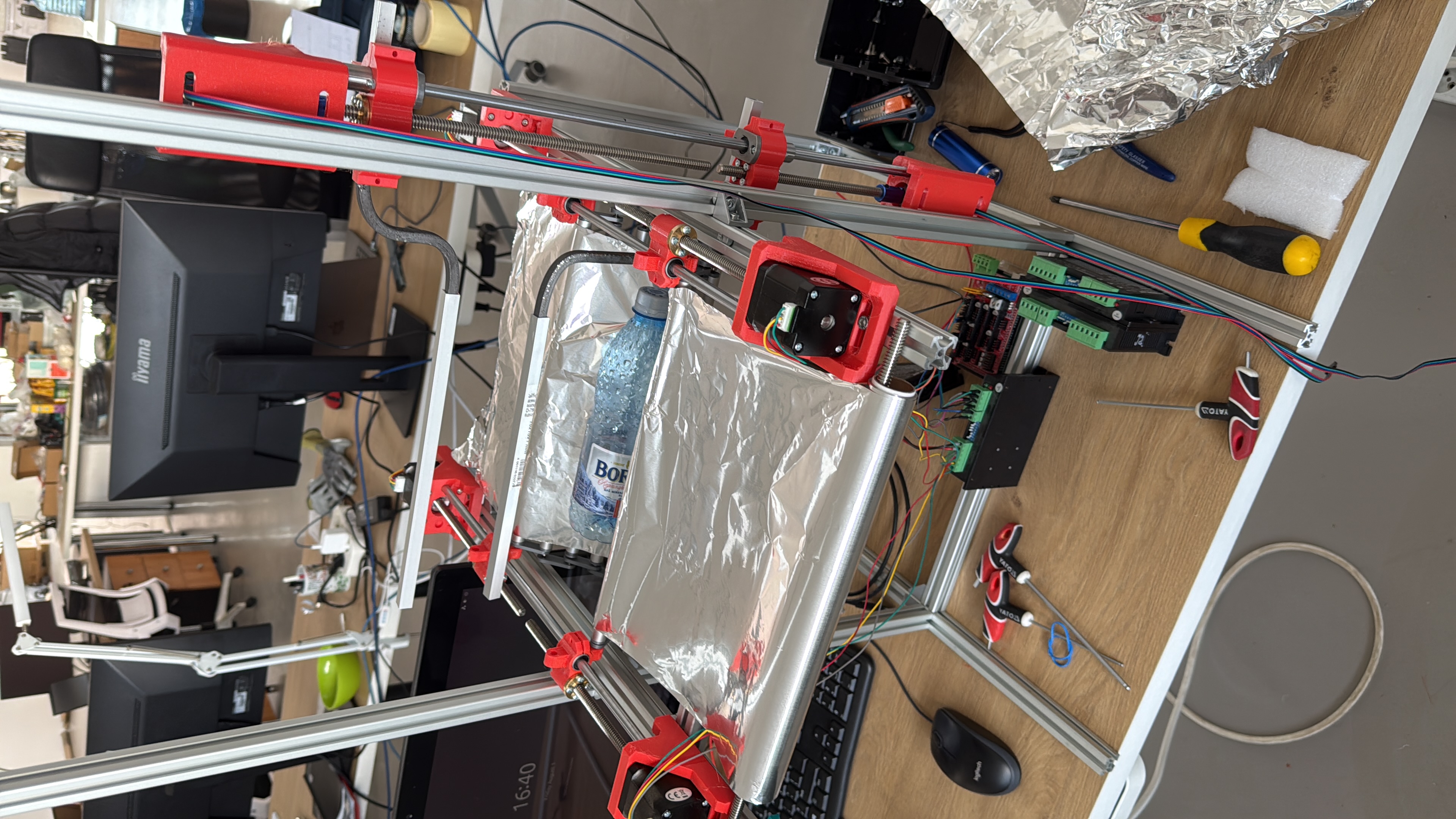
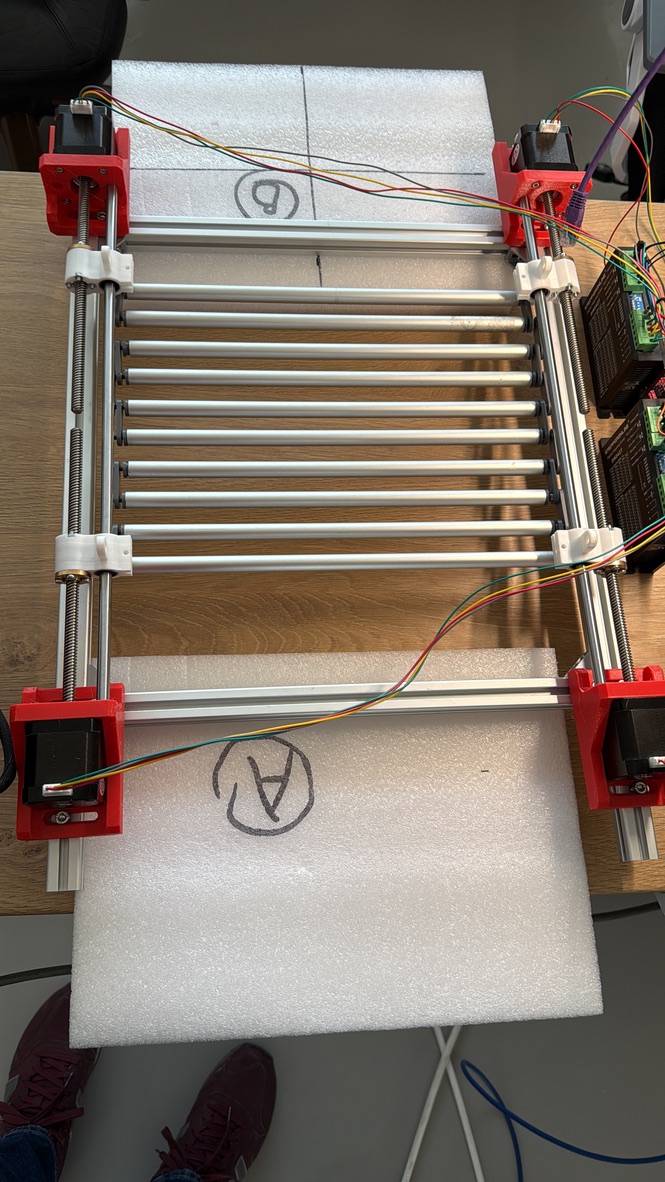
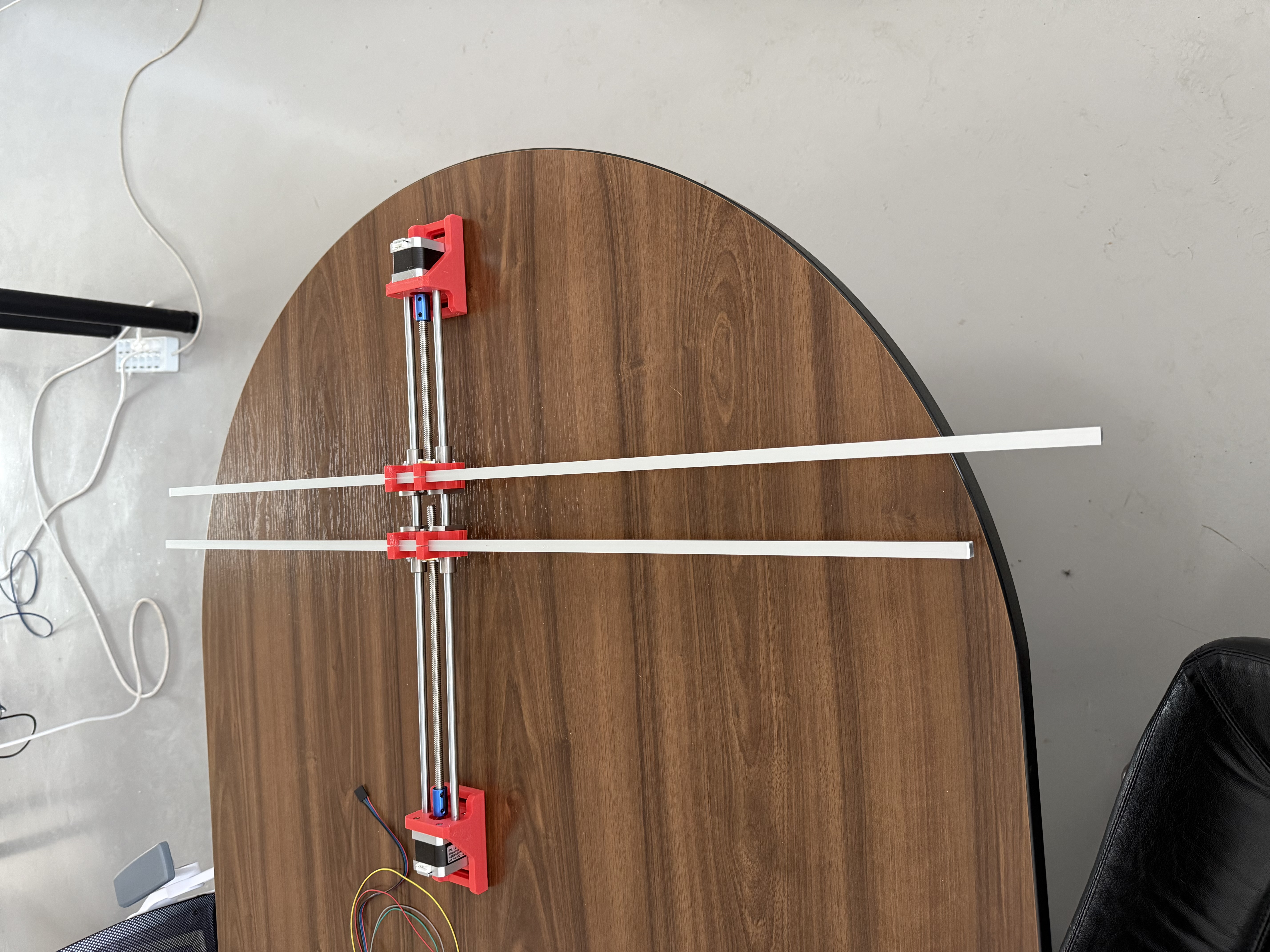
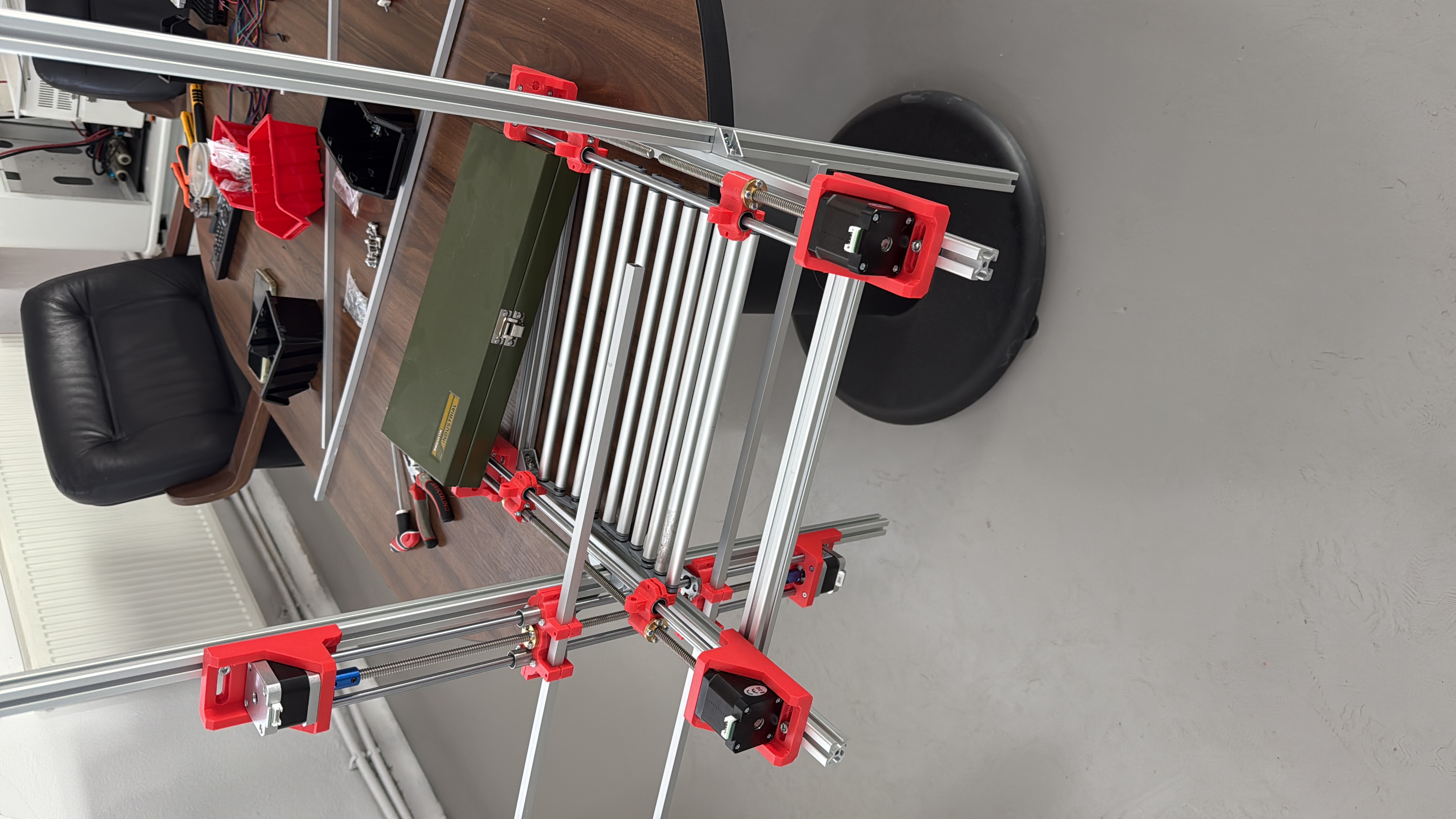
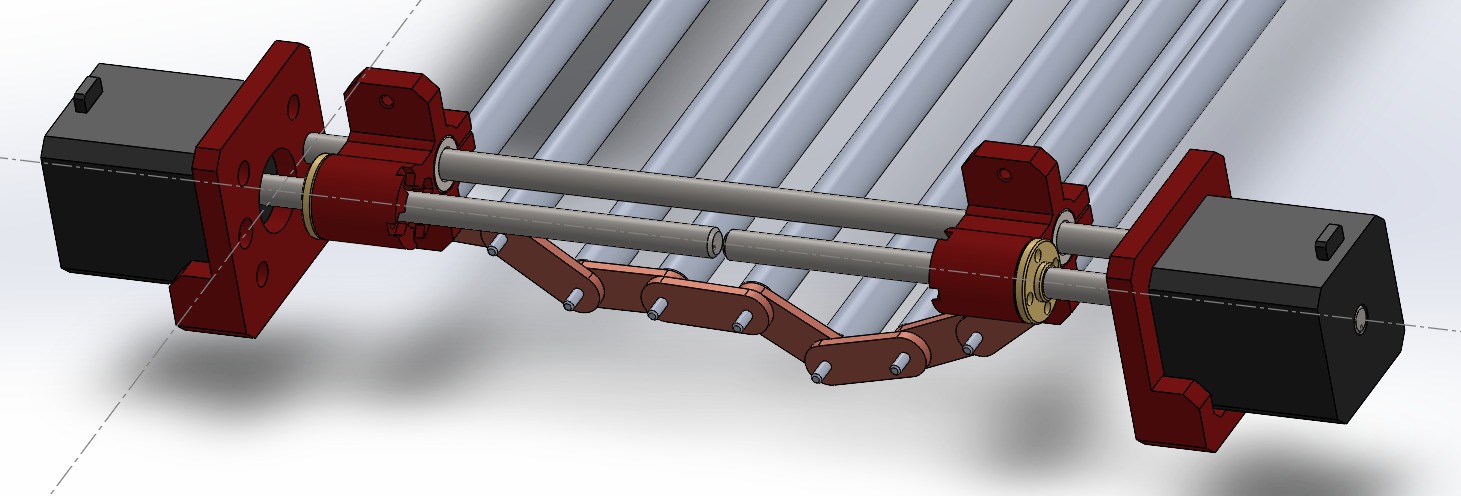
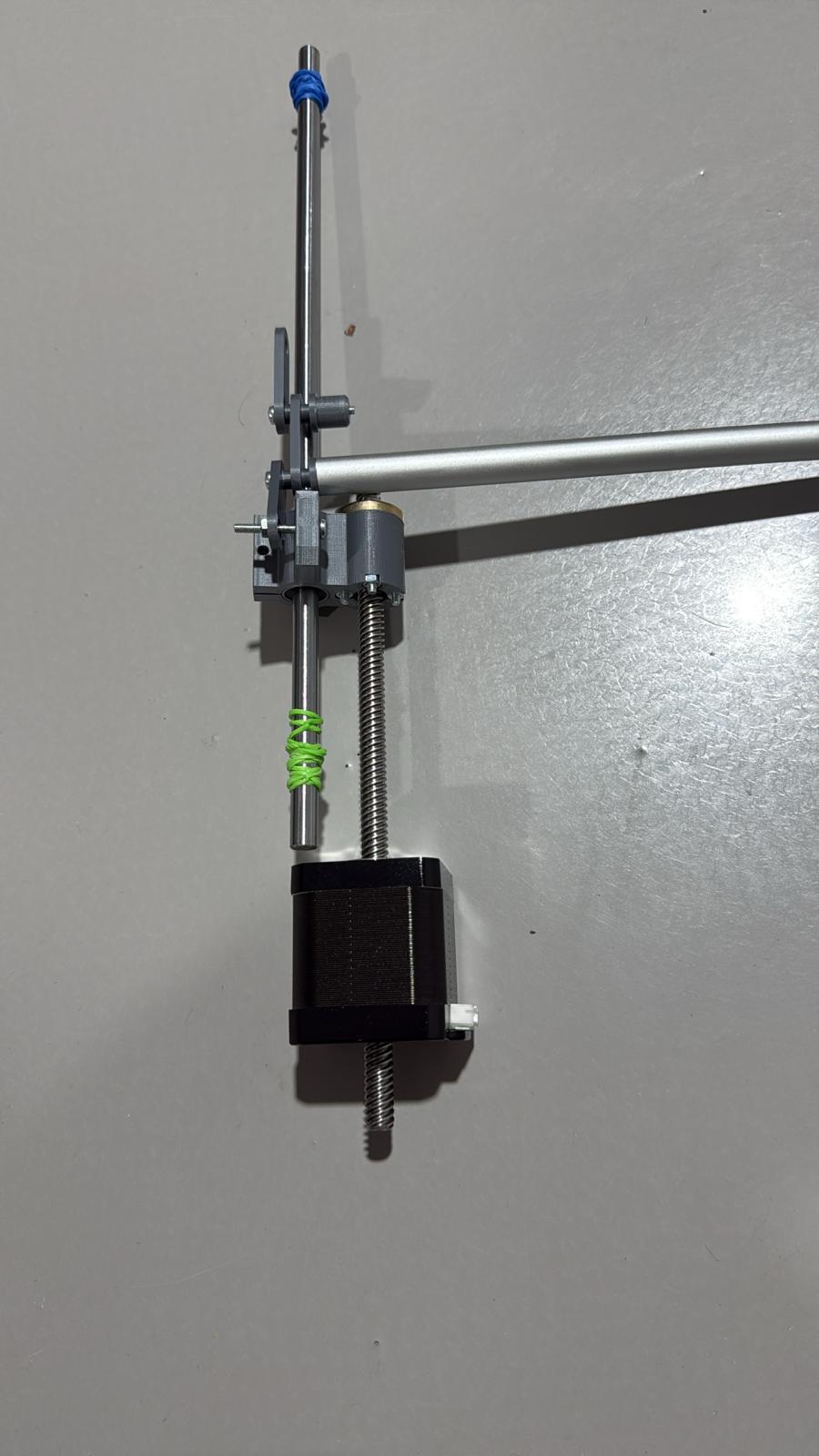
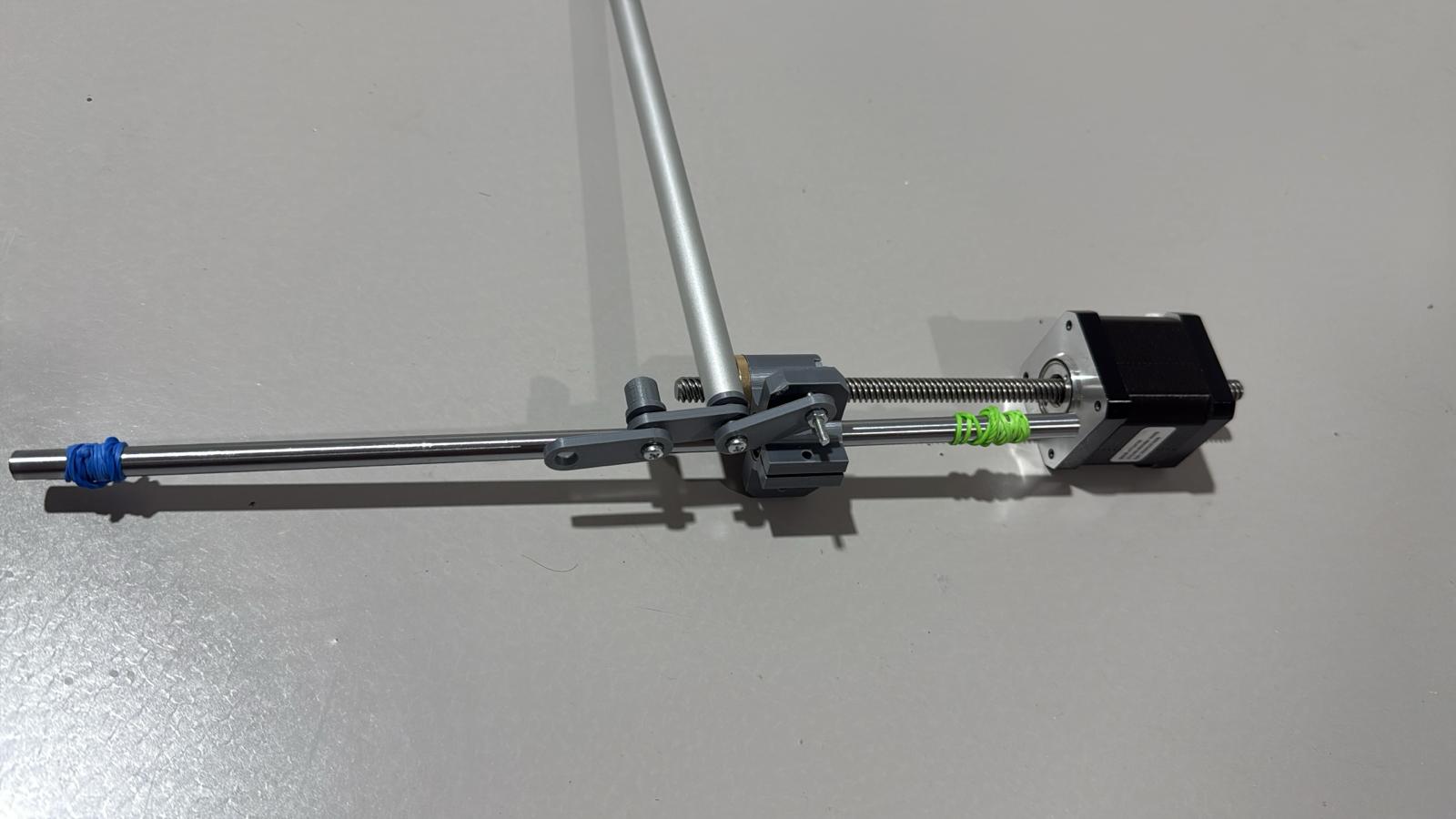
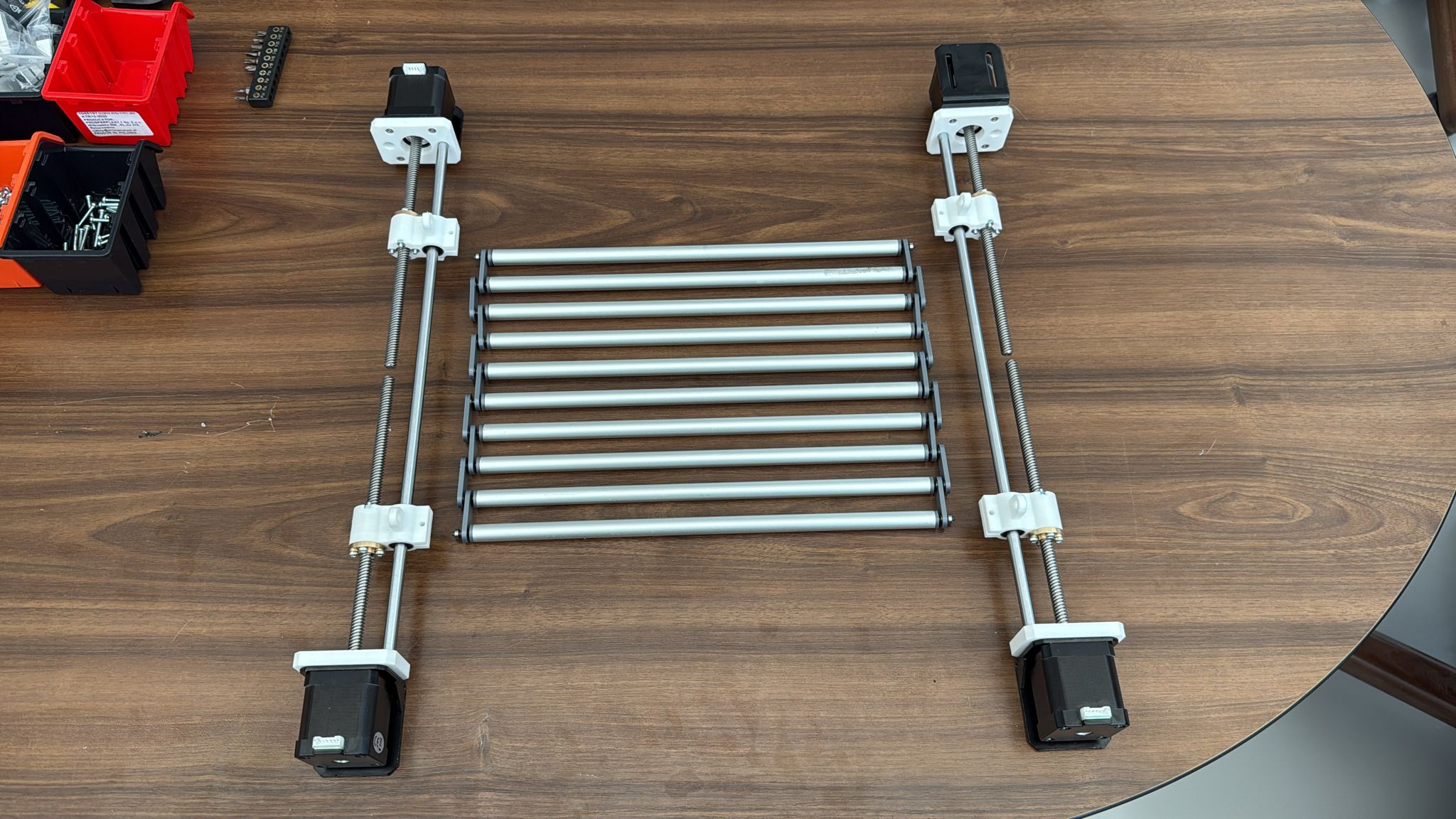
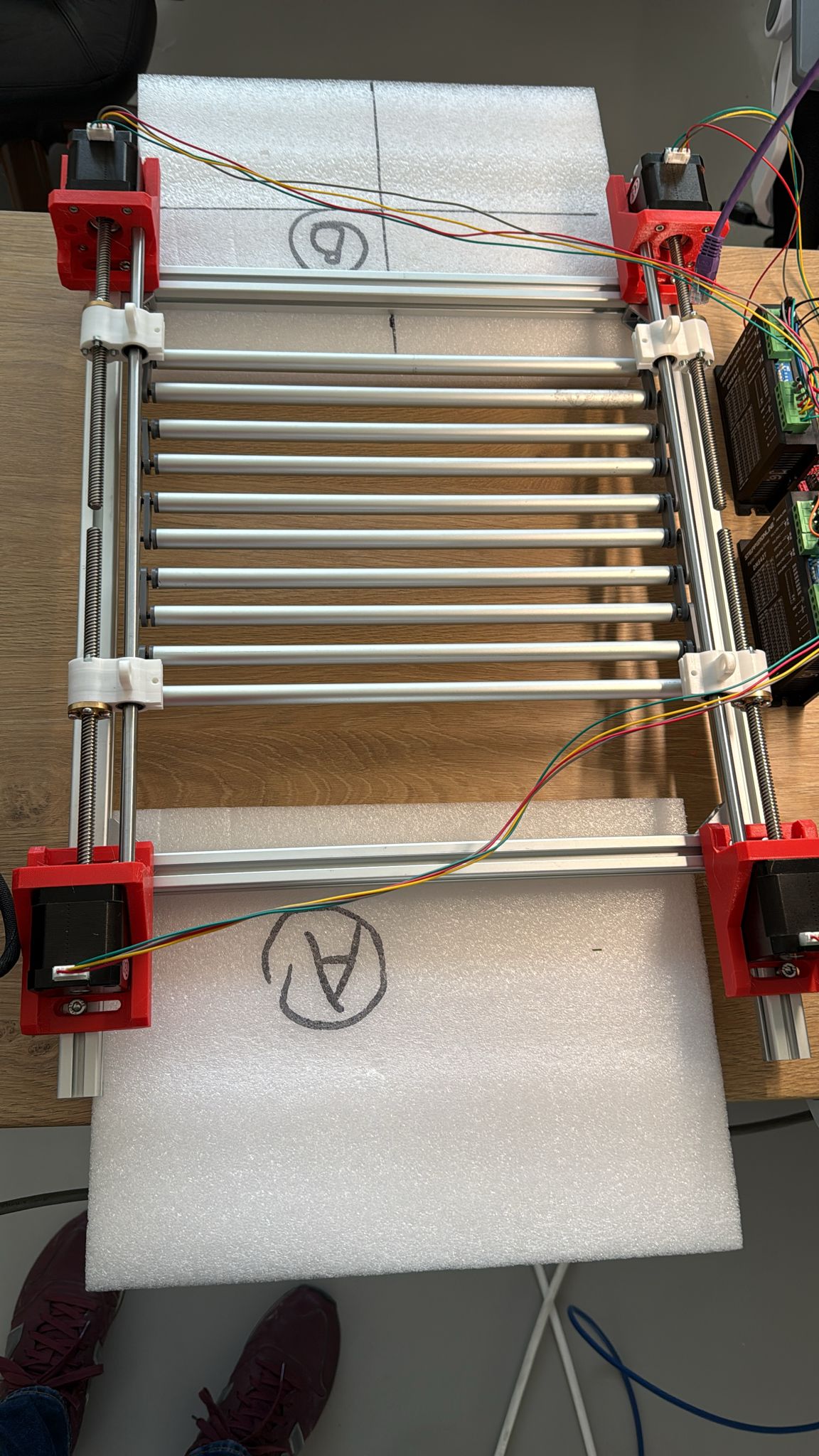
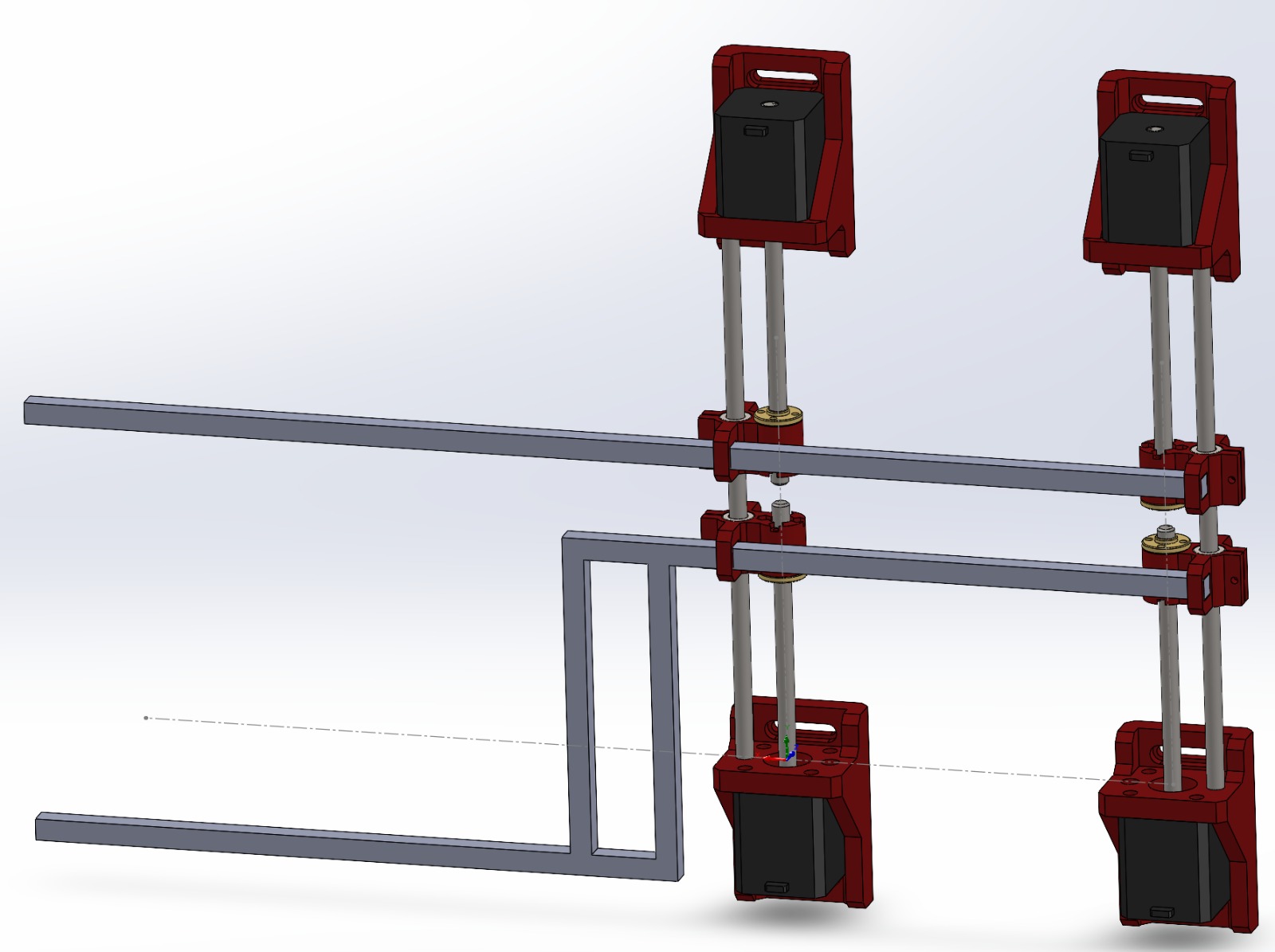
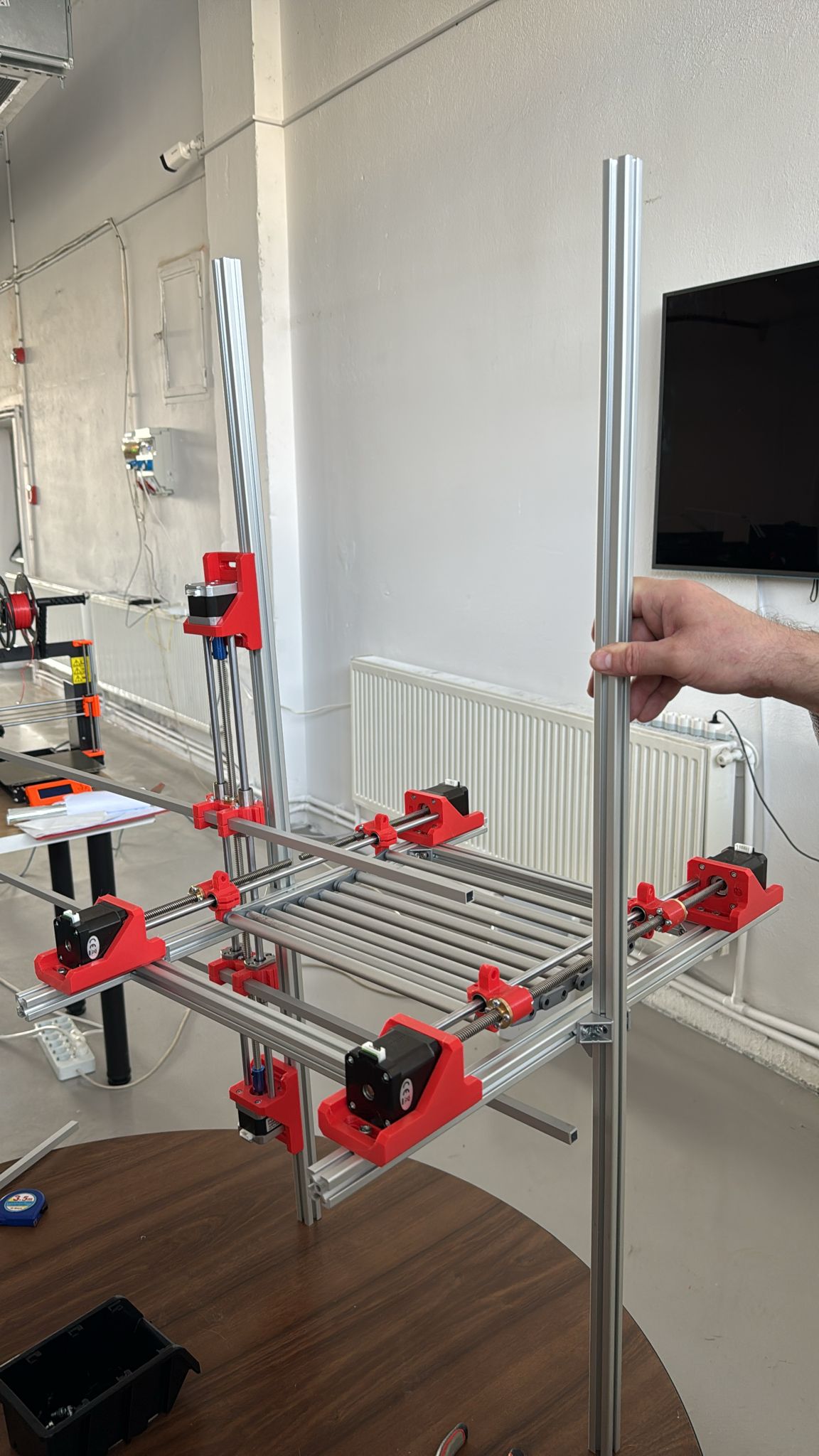
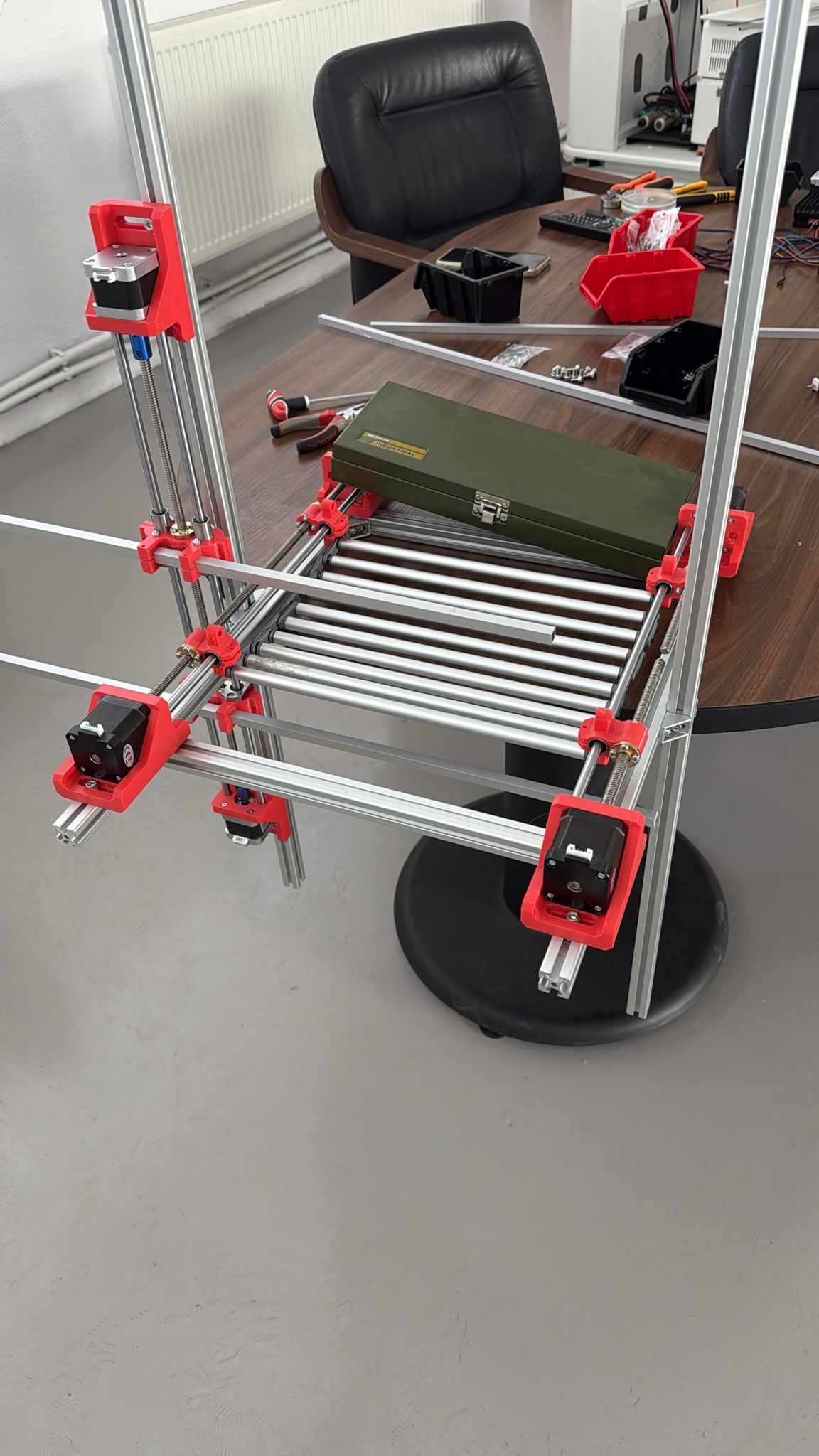
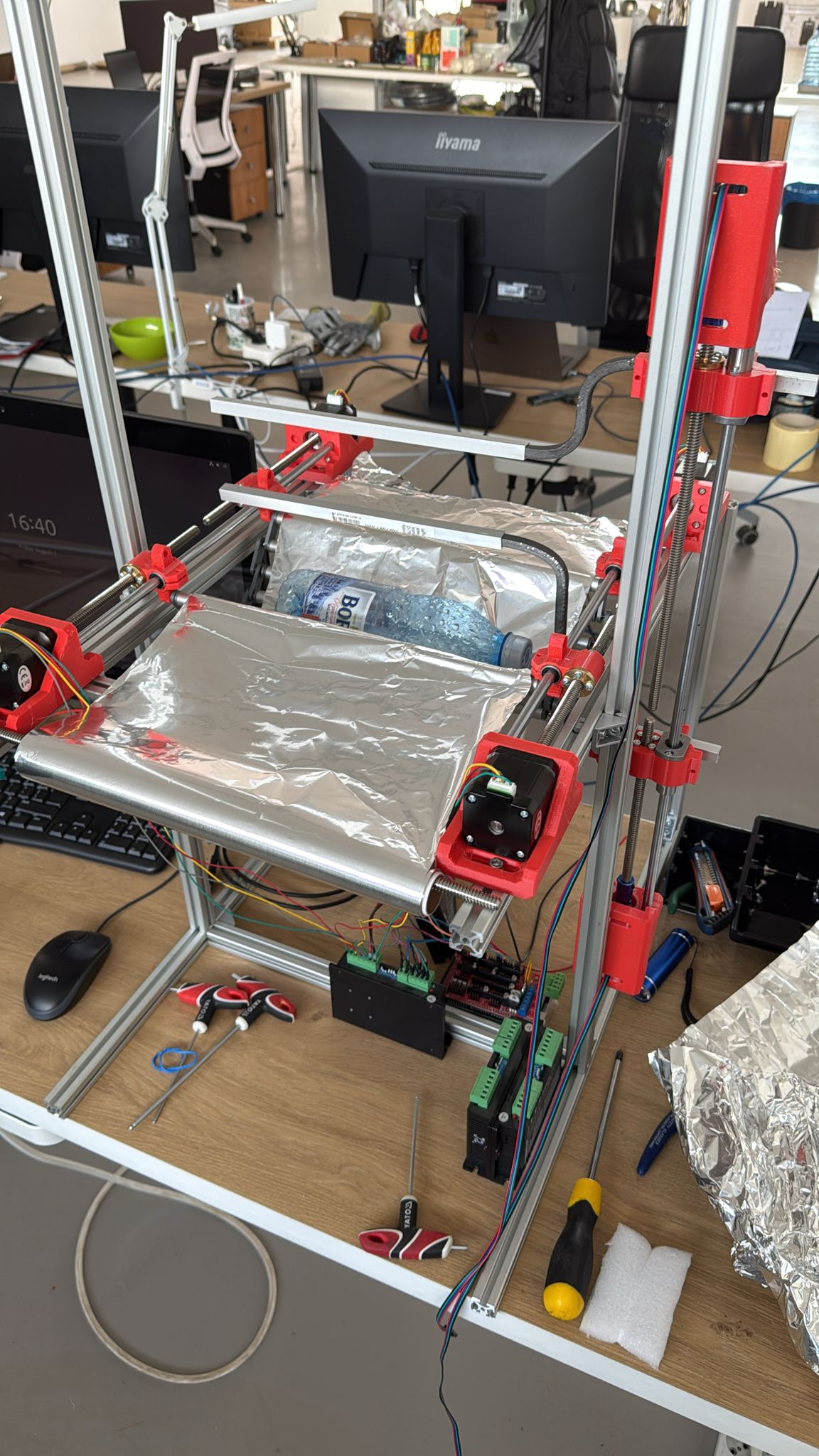
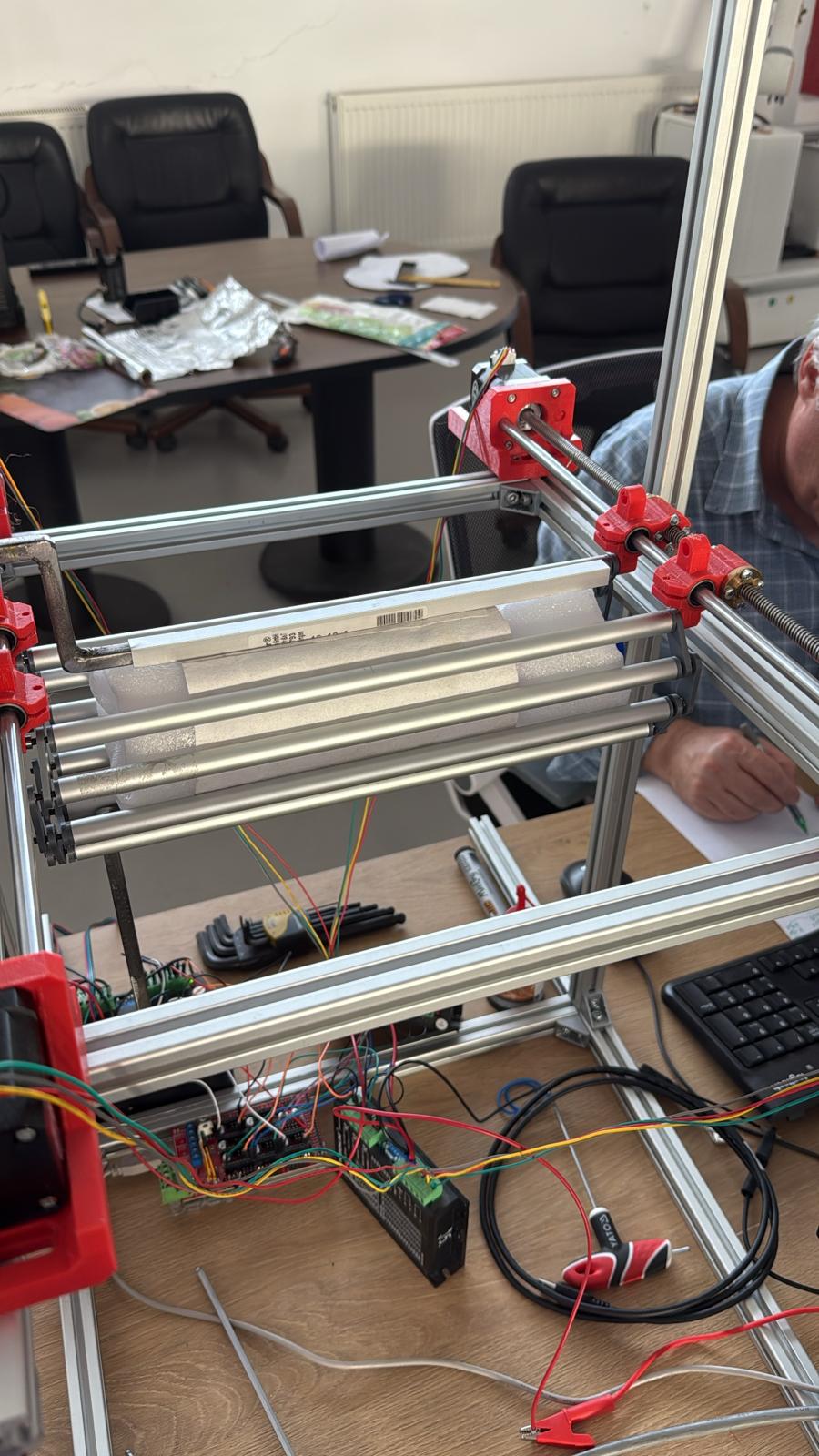
Shawarma Wrapping Device
- Developed core mechanics using timing belts, bearings, and a stepper/servo motion system
- Built and tested both the rolling subsystem and the extraction subsystem
- Evaluated multiple structural materials (aluminum, stainless steel, composites) for stiffness, hygiene, and manufacturability
- Experimented with various timing belts, stepper motors, servo drivers, and stepper motor drivers to optimize torque, precision, and repeatability
- Motion tests completed; next step is integrating sensors and force-feedback control for a fully automated wrapping sequence
Mechatronics & Food Handling
- Tested multiple sauce-dispensing systems to handle high-viscosity fluids (ketchup, garlic sauce), including gear pumps, peristaltic pumps, and diaphragm pumps
- Compared dosing precision, flow stability, and cleaning requirements to select the most reliable food-grade mechanism
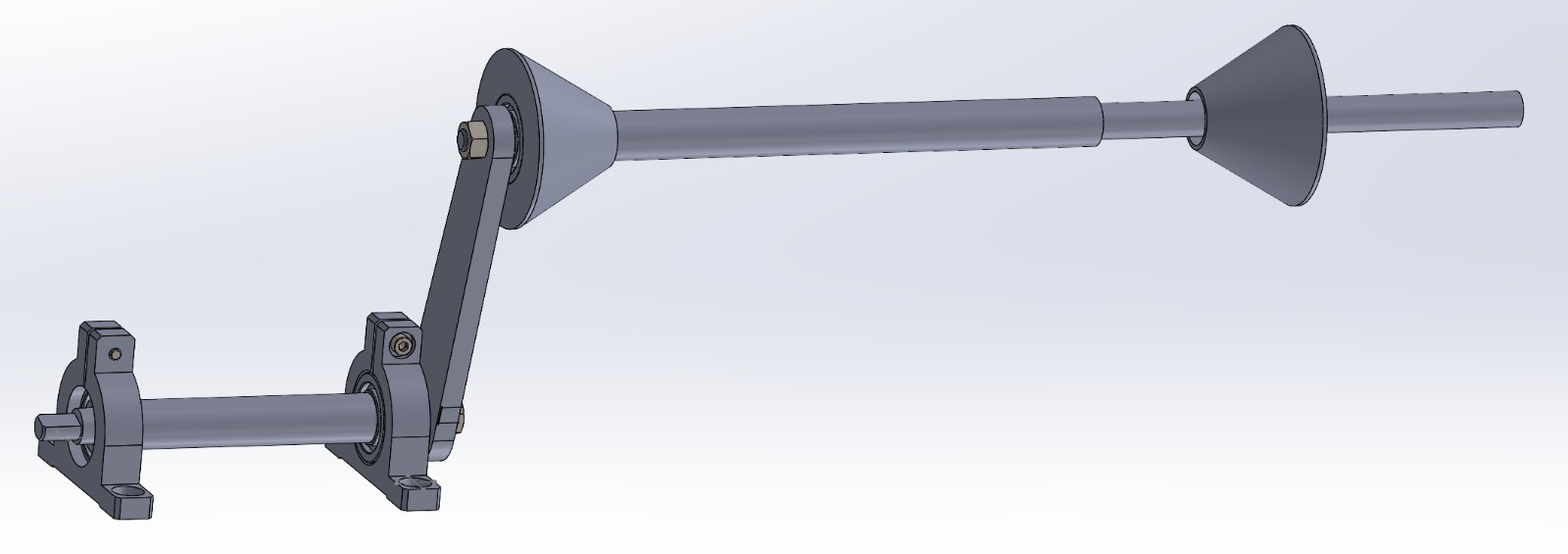
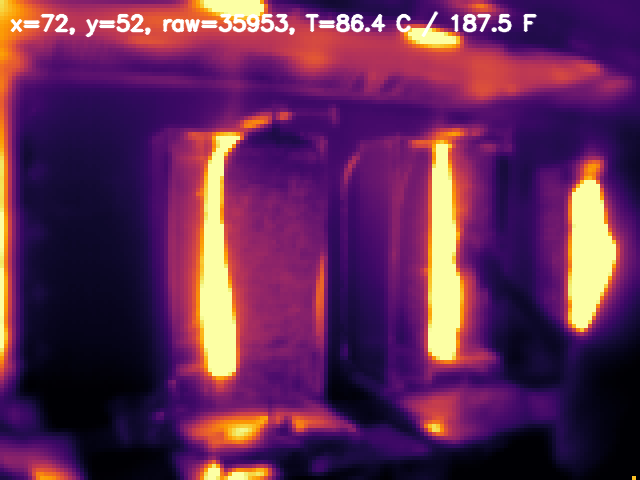
Cooking & Thermal Control
- Modeled shawarma cooking parameters: radiator power, cone geometry, meat–radiator distance, angular velocity, and tangential surface speed
- Measured real cooking temperatures using a 160×120 radiometric thermal camera (TELEDYNE FLIR Lepton® 3.5) and fast-response thermocouple probes
- Collected thermal maps to validate our heat-transfer model and tune PID temperature regulation
- Created mechanical design drafts for an automated cooking module
- Evaluated how to upgrade existing commercial shawarma rotisserie machines for robotic integration
Control Systems — Operational
- Implemented real-time motion pipelines using EtherCAT (Inovance IS620N drivers, IgH EtherCAT Master, SOEM)
- Designed and built custom STM32 and Teensy control boards for motion control and sensor interfaces
- Tested Raspberry Pi CM4 and CM5, plus a range of China-made embedded compute modules for edge control
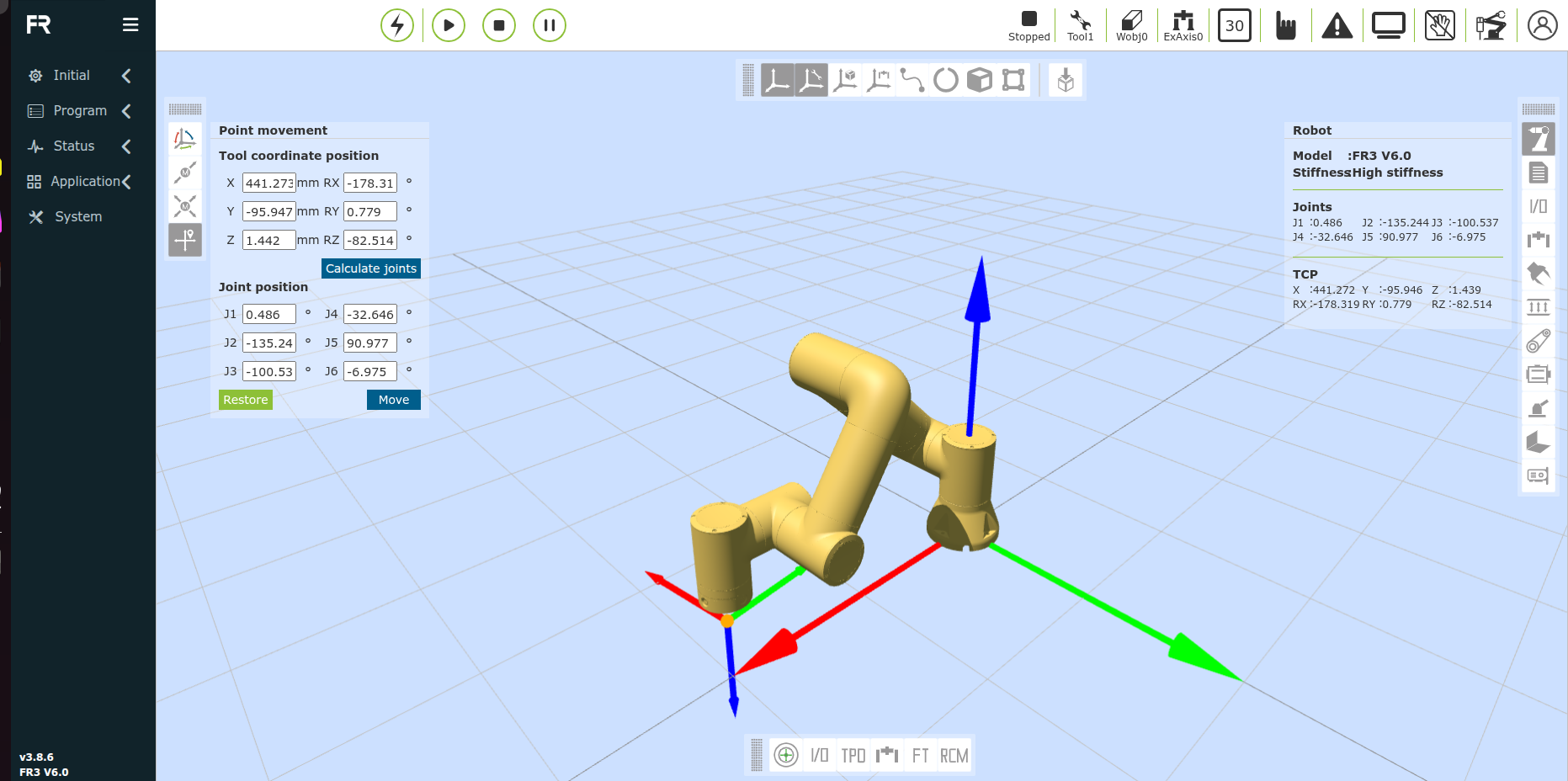
- Tested ROS 1 and ROS 2 (MoveIt, TF, planning pipelines) to evaluate kinematics and orchestration before designing our custom control layer
- Integrated robot SDKs for Borunte and Fairino platforms
- Evaluated multiple EtherCAT master stacks and communication topologies to optimize latency, determinism, and reliability
Workshop & Prototyping Pipeline — Ready
- MIG welding, machining, 3D printing
- PCB manufacturing via China
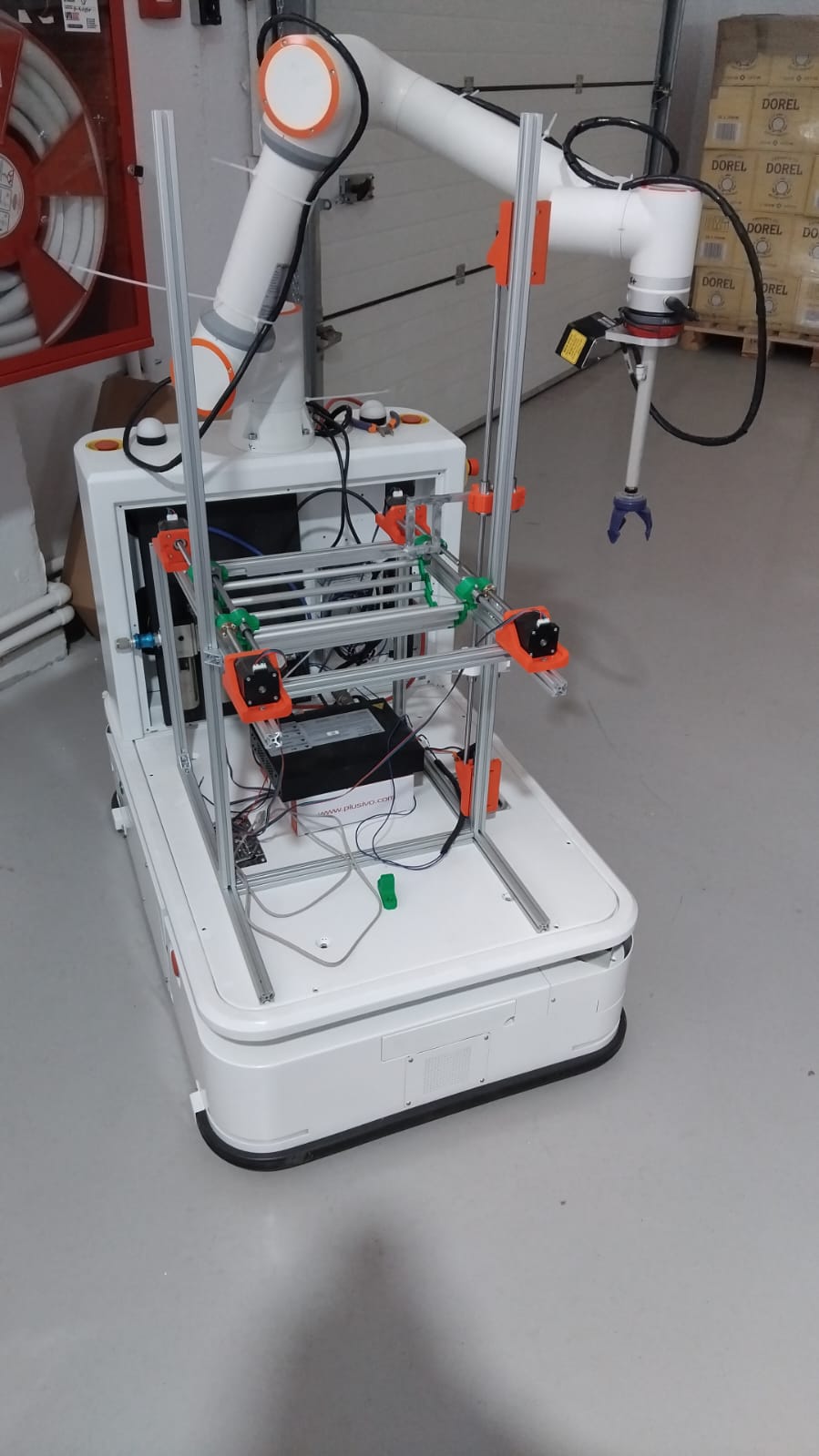
- AMR (Wellwit WAR100-SL) for internal transport
📸 Photo Gallery
📍 Why This Is Hard
Food automation is complex — it requires:
- robotics
- AI vision
- real-time motion
- mechanical engineering
- electronics
- control systems
- industrial design
- simulation
I’ve built all of these individually, then integrated them into working prototypes.
This lets me move 10× faster than teams that split these skills across 5–10 engineers.
👤 Founder
Gabriel Breahna
Industrial Engineer & Robotics, Software Development
Experience:
- Oracle (cloud + distributed systems)
- Homologated a 12.4-liter CNG engine at TÜV Prague (Euro 6), coordinating sensors, control systems, and safety validation
- Robotics: SCADA systems, EtherCAT, PLCs
- Vision, ML, 3D cameras, custom EOATs
- Custom STM32 devices manufactured in China
📈 Path to Market
- Deploy modules in a real shop (fryer → wrapper → full assembly line).
- Full automated shawarma shop in 24 months.
- Scale to pizza, burgers, fried chicken with the same modules.
- Containerized franchise expansion across Romania → EU → US.
🚀 Introduction